SLAM and path planning in simulation#
The procedure for the simulation is almost the same as in Laser-based SLAM and path planning on the robot with RViz and Autonomous navigation with ARI, except that instead of using a real robot, it uses a Gazebo world and simulated ARI robot.
source /opt/pal/gallium/setup.bash
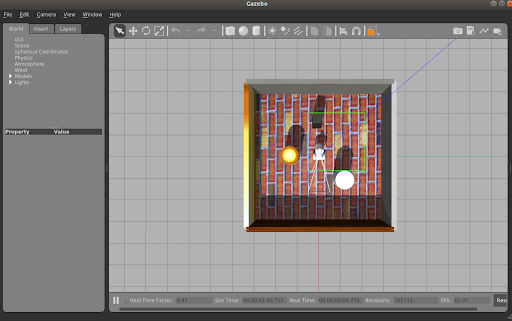
roslaunch ari_2dnav_gazebo ari_navigation.launch
The Gazebo window shown in the figure below will open and the robot should be visible in a small enclosed environment.
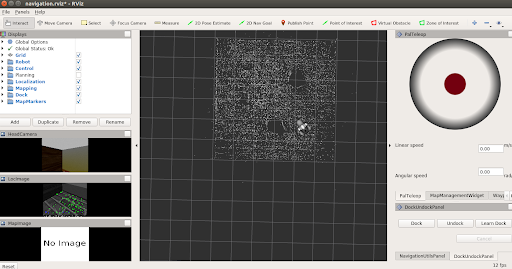
Furthermore, a rviz window will open with the same content as with the real
robot, loading the map of the simulation.
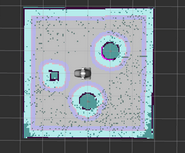
Using the graphical, or the teleop package, move the robot around taking considerations as with the real one in order to build the Point Cloud map after selecting Start Mapping in the MapManagementWidget. Once finished, select Stop Mapping, and an occupancy grid will be produced.