Hardware overview#
ARI is a humanoid robot designed to create natural human-robot interactions between robot and users. This page provides an overview the hardware components of ARI.
ARI components#
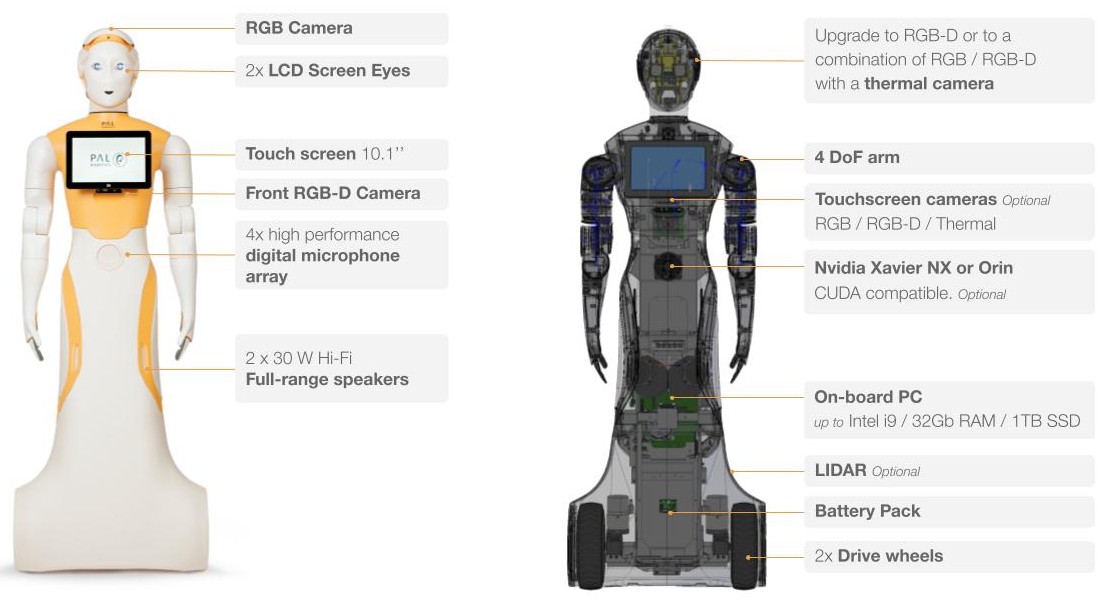
The following is a list of ARI’s components:
Degrees of Freedom |
Computer power |
Displays |
|---|---|---|
|
|
|
Vision |
Connectivity |
Audio |
Battery |
|---|---|---|---|
|
|
|
|

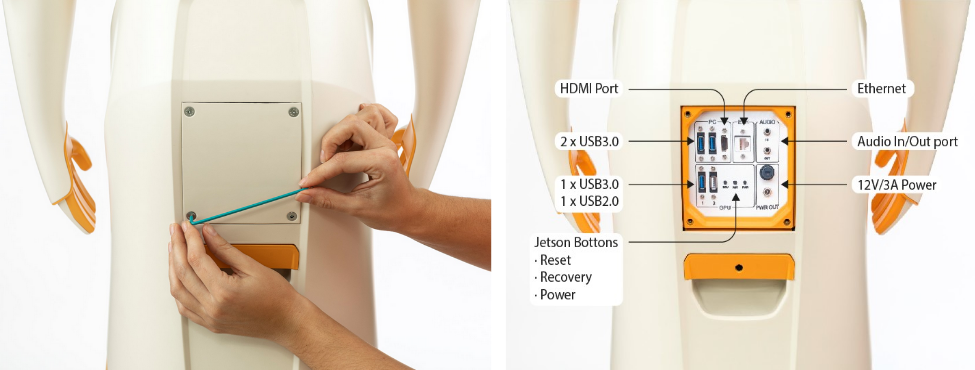
Expansion panel#
The expansion panel is at the back of the robot. It provides access to the following additional connectors:
1x Gigabyte Ethernet
3 x USB 3.0, 1 x USB 2.0
HDMI
Audio In/Out port
12V / 3A power
Jetson buttons (Reset, Recovery, Power)
To access the panel, remove the cover as indicated below using a Allen key number 3.
See also#
You might want to check ARI’s unboxing to know how to start developing with ARI.