TIAGo power management and docking#
Turning on the robot safely#
Caution
The procedure described in this section requires to have a clearance of about 1.5 m in front of the robot and at each of its sides in order to execute the required movements safely.
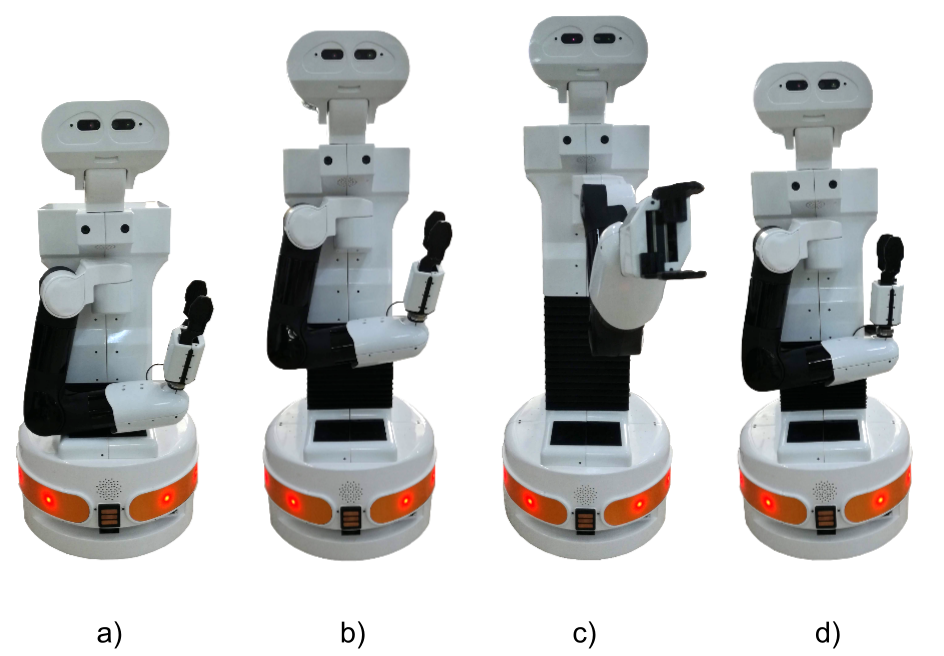
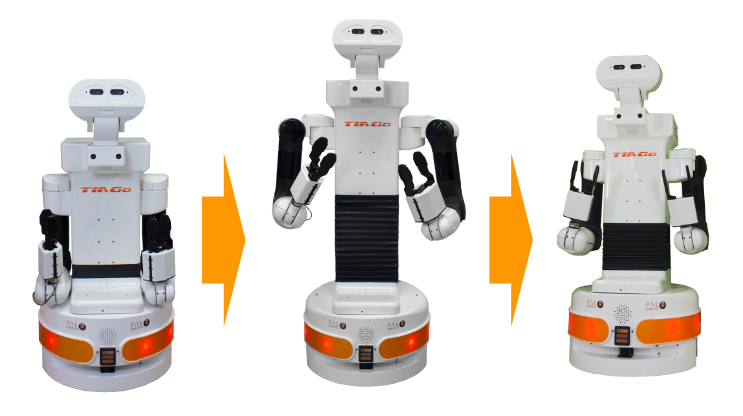
When the robot is started the arms will be lying on the lateral sides of the mobile base. If the robot arms are left in such position after turning the robot on the heat from the arm motors may be transfered, after some time, to the paint of the robot’s base cover which may end up melting it and causing aesthetical damage to these covers. In order to prevent this follow the procedure depicted in Figure: Procedure to start moving the arm safely and here after explained:
Raise the torso to its maximum height using the joystick. In case the torso does not move either press the button Get out of collision in the Demos tab of the WebCommander, or run the following command line instruction:
export ROS_MASTER_URI=http://tiago-0c:11311
rosservice call /get_out_of_collision
b) Execute the Offer Both movement using, for instance, the Movements tab of the WebCommander
c) Exectute the Home motion in order to fold back the arms and the torso into a safe configuration where no contacts occur with the base of the robot.
Shutting down the robot safely#
The general procedure to turn off TIAGo is the following:
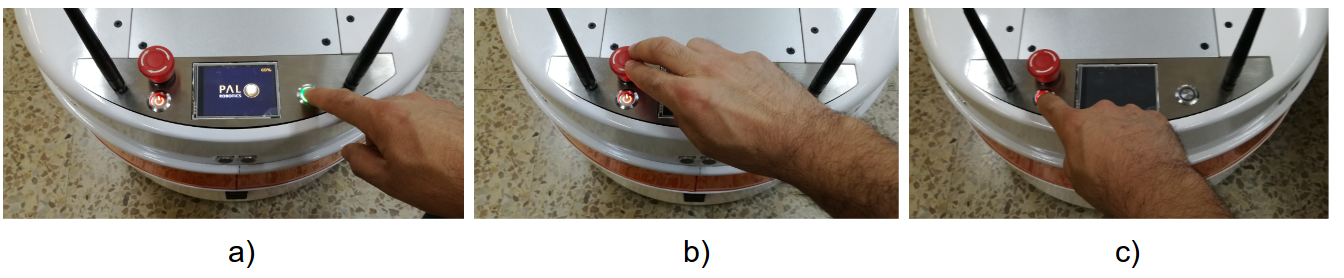
Press the On/Off button for 1 second and then wait until the green light indicator stops blinking
Press the emergency stop
Press the electric switch (the red light indicator will go off) to power off all the electronic components of the robot
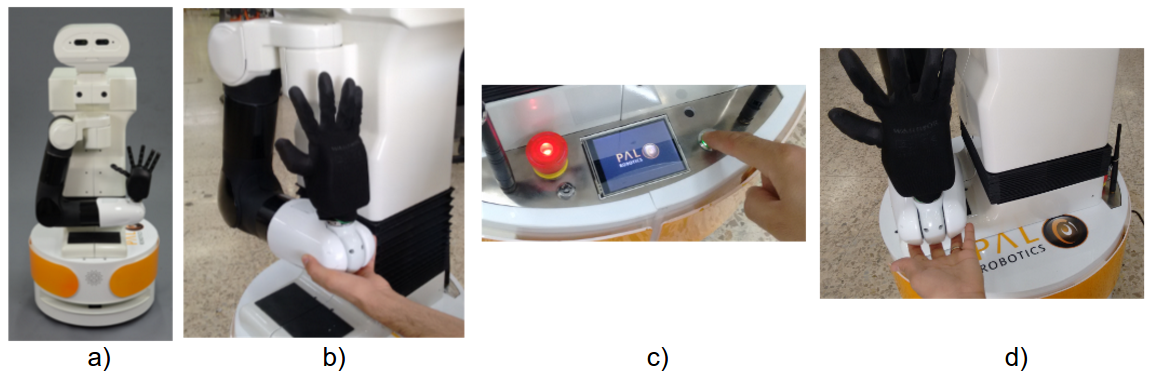
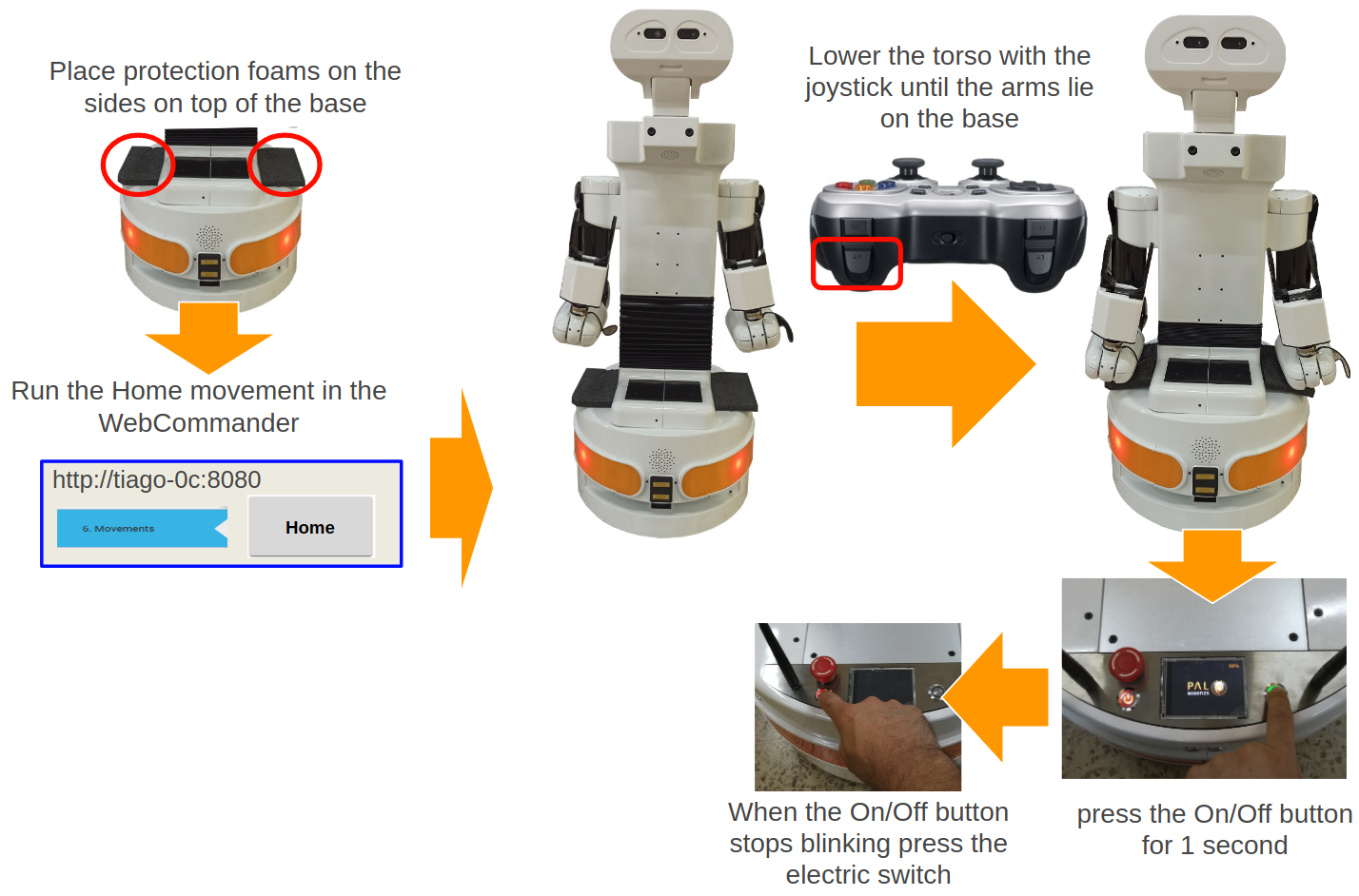
Special care needs to be taken when shutting down or powering off the motors by using the emergency button. In order to avoid bumping the arms against the base of the robot or the floor, the following procedure must be followed, as depicted in figure below:
Caution
We recommend two people when shutting down a TIAGo robot with one or two arms, so that one person can support the arms while the torso is going down, preventing e.g. self-collisions.
Emergency stop#
Warning
To safely operate with the emergency stop of TIAGo two people are recommended.
The emergency stop button can be found on the back of the robot between the power button and the battery level display. As the name implies, this button should only be used only in exceptional cases, when an immediate stop of the robot’s motors is required.
To activate the emergency stop, the user has to push the button. To deactivate the emergency stop, the button has to be rotated clockwise, according to the indications on the button, until it pops out.
Be careful using this emergency stop because the motors will be switched OFF and the arms will fall down, while the computer remains on.
After releasing the emergency stop button, the user has to re-start the robot by pressing the On/Off button until it stops blinking. After this operation, the robot’s status should be restored to that prior to pressing the emergency button in few seconds.
Low battery shutdown#
If the battery falls below a certain critical level, the current consumption is progressively reduced in order to make the arm fall down slowly and avoid any damage in the robot due to a blackout. Nevertheless, we recommend the user to avoid working when the battery is very low becuase when the arm falls down, even if slowly, it may collide with the environment.