End-effectors#
TIAGo’s end-effector is one of the modular features of the robot. TIAGo can be used with six inter-changeable end-effectors: the Hey5 hand, the PAL parallel gripper, the Schunk WSG32 industrial gripper, the Robotiq 2F-85 gripper, the Robotiq-2F-140 gripper and the Robotiq EPick vacuum gripper.
Hey5 hand#
The Hey5 hand is shown in the figure below. The main specifications of this underactuated, self-contained hand are summarized in the table.
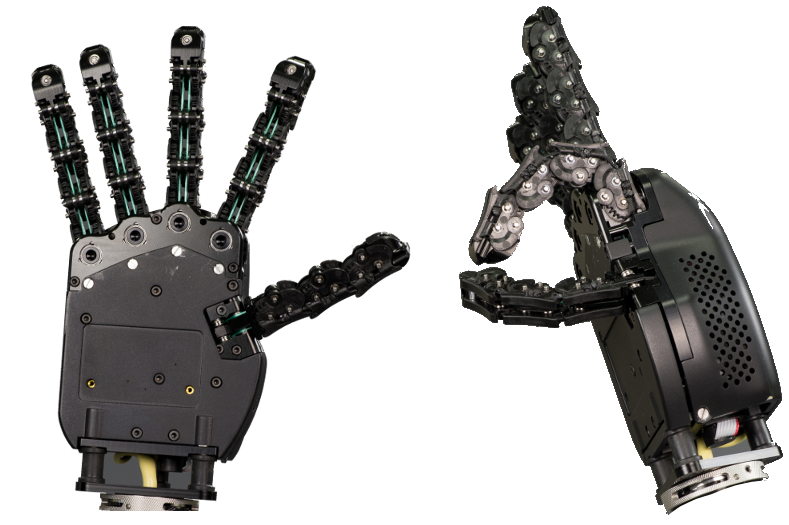
Figure: Hey5 hand#
Weight |
720 g |
Payload |
1 Kg |
Joints |
19 |
Description |
Max speed [rpm] |
Max troque [Nm] |
|---|---|---|
Thumb |
32 |
0.23 |
Index |
32 |
0.23 |
Middle+right+little |
34 |
0.45 |
Credits and attribution
The Hey5 hand has been developed by PAL Robotics Inc., with contributions from QBrobotics srl.
The Hey5 hand is a derivative of the Pisa/IIT SoftHand open source project by M. G. Catalano, G. Grioli, E. Farnioli, A. Serio, C. Piazza and A. Bicchi.
The Pisa/IIT SoftHand project is distributed under Creative Commons Attribution 4.0 International License and is available at NaturalMachineMotionInitiative.com.
PAL gripper#
The PAL parallel gripper is shown in figure below. The gripper contains two motors, each controlling one of the fingers. Each finger has a linear range of 4 cm.

Figure: PAL gripper#
Weight |
800 g |
Payload |
2 Kg |
interchangeable fingers |
Yes |
Description |
Reduction |
Max speed [rpm] |
Max troque [Nm] |
Absolute encoder |
|---|---|---|---|---|
Left finger |
193:1 |
55 |
2.5 |
12 bits |
Right finger |
193:1 |
55 |
2.5 |
12 bits |
Robotiq 2F-85/140 gripper#
The adaptative robotiq gripper 2F-85 and 2F-140 are shown in the figure below. Their respective specifications canbe found in figure

Figure: Robotiq 2F-85/140 grippers#
Model |
2F-85 |
2F-140 |
Weight |
900 g |
1000 g |
Form-fit grip payload |
5 kg |
2.5 kg |
Gripper size |
85 mm |
140 mm |
Grip force |
20 to 235 N |
10 to 125 N |
Closing speed |
20 to 150 mm/s |
30 to 250 mm/s |
Note
Since the arm without end effector has a maximum payload of 3 kg, the real payload of 2F-85 and 2F-140 are 2.1 kg and 2.0 kg respectively.
The gripper equilibrium line is the grasping region that separates the encompassing grasp from the parallel grasp. When grasping an object close enough to the inside (palm) of the gripper, the encompassing grasp will occur (unless the object size or shape is not adequate) and the fingers will close around the object.
If grasped above the equilibrium line, the same object will be picked up in a parallel grasp by the fingertips and the fingers will close with a parallel motion. The figure below shows the encompassing grasp region, the equilibrium line, and the parallel grasp region on the 2-Finger Adaptive Gripper.
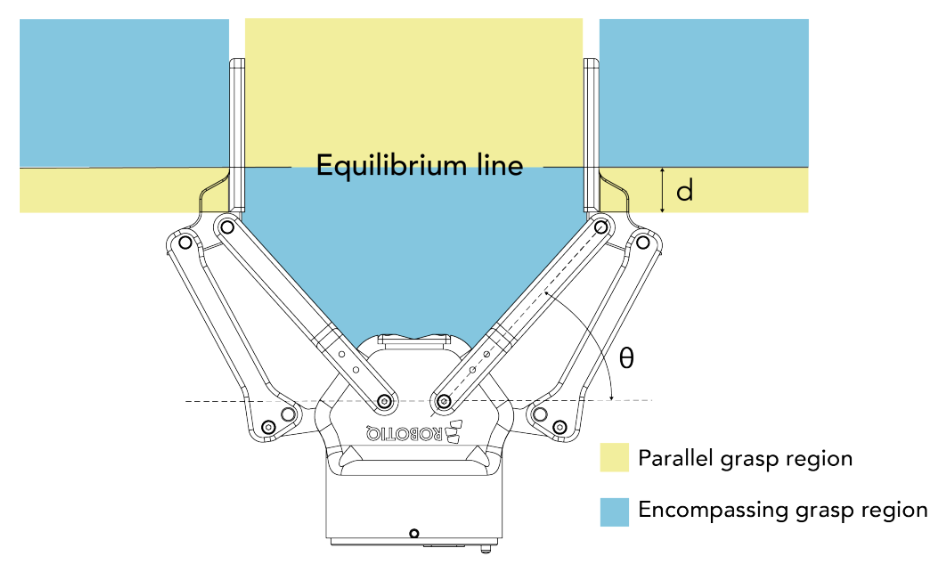
Figure: Robotiq 2F-85/140 gripper equilibrium line#
Robotiq EPick Vacuum gripper#
The Robotiq EPick vacuum gripper is a gripper shown in the figure below. It uses a suction cup to create a vac- uum to grasp an object, without an external air supply, making it suitable for mobile robots. The mechanical specifications are listed in table below.

Figure: Robotiq 2F-85/140 gripper equilibrium line#
Model |
EPick vacuum gripper |
Energy source |
Electricity |
Weight |
820 g |
Payload |
2 kg |
Maximum vacuum level |
80 % |
Maximum vacuum flow |
12 L/min |
Opertating ambient temperature |
5 to 40 °C |
Schunk gripper WSG32#
Warning
Since September 2019 the Schunk WSG32 gripper is no longer available as the manufacturer has discountinued this product. Documentation about this end-effector is kept in this handbook as reference for customers already owning it.
The Schunk gripper WSG32 is an industrial parallel gripper that has been electro-mechanically integrated in TIAGo by PAL Robotics. The gripper has been integrated in the CAN bus of the robot’s arm. The integrated version of the gripper is shown in figure below. The gripper contains a single motor and is compatible with two different commercial fingers:
ABF WSG32/50-DV: with integrated force sensing
ABF WSG32/50-GV: no force sensors integrated
Furthermore, users can design their own fingers.

Figure: Schunk WSG32 gripper#
Model |
WSG 032-068-C |
Weight |
550 g |
Payload |
2 kg |
Interchangeable fingers |
Yes |
Stroke per jaw |
34 mm |
Min. gripping force |
5 N |
Permanent gripping force (100% continuous duty) |
50 N |
Max. speed |
400 mm/s |