TIAGo hardware overview#
Robot’s main specifications#
Height |
110 - 145 cm |
Weight |
60 Kg |
Base footprint |
Ø 54 cm |
Mobile base |
2 |
Torso lift |
1 |
Head |
2 |
Drive system |
Differential |
Max speed |
1 m/s |
Lift stroke |
35 cm |
Battery |
36 V, 20 Ah |
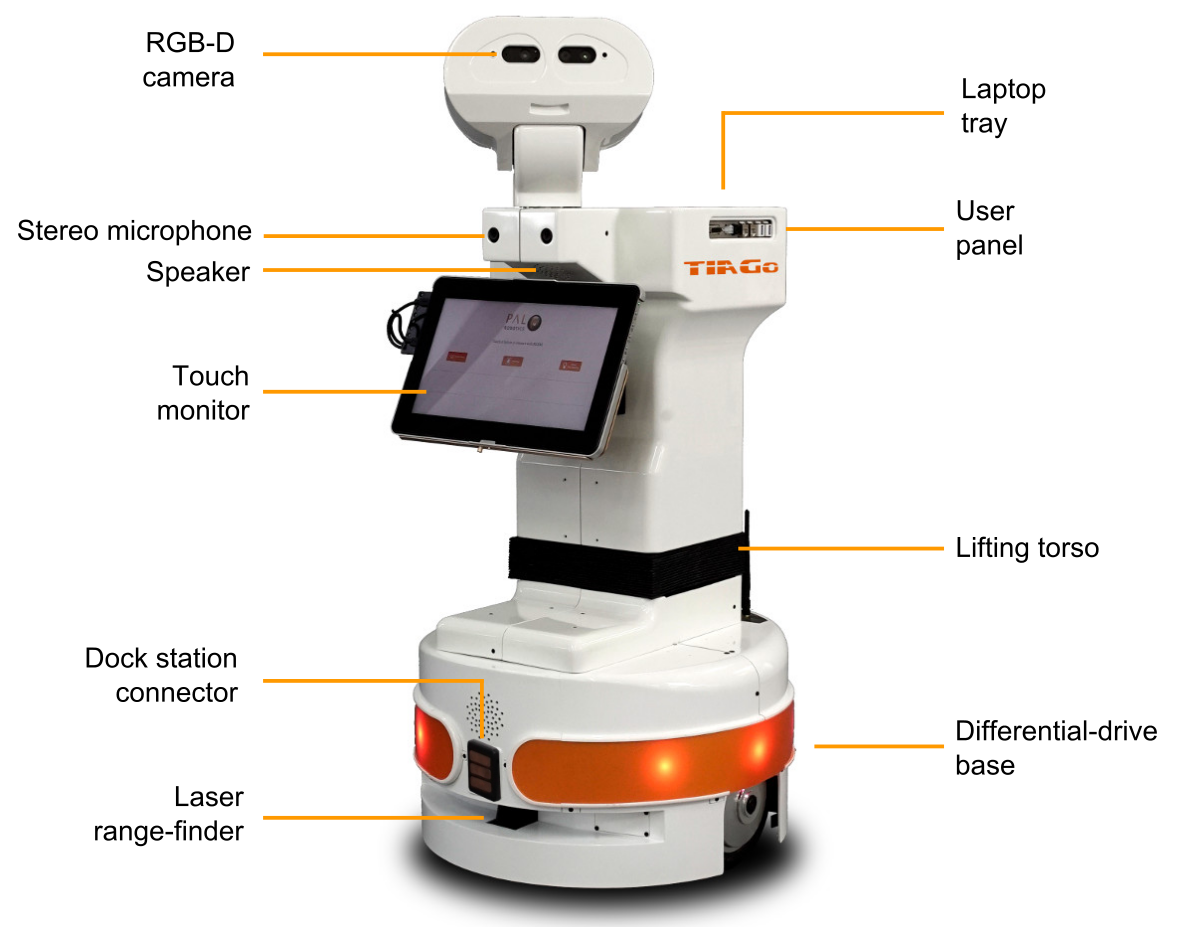
Base |
Laser range-finder, Sonars, IMU |
Torso |
Stereo microphones |
Head |
RGB-D camera |
Touch monitor
TIAGo may be equipped with a touch monitor as shown in figure below:

The main technical specifications are shown in table:
Panel type |
13.3” TFT IPS LCD (16:9 wide) LED Backlight |
Touch type |
Projective capacitive touch monitor, support 10-finger multi-point touch |
Resolution/Color depth |
1920x1080/16.7 M colors |
Active area |
294x165 mm |
Contrast ratio |
700:1 |
Response time |
14 ms |
Detailed specifications:

Height |
110 - 145 cm |
Weight |
72 Kg |
Base footprint |
Ø 54 cm |
Mobile base |
2 |
Torso lift |
1 |
Arm |
4 |
Wrist |
3 |
Head |
2 |
Hey5 hand |
19 (3 actuated) |
PAL gripper |
2 |
Drive system |
Differential |
Max speed |
1 m/s |
Lift stroke |
35 cm |
Payload |
2 Kg |
Reach |
87 cm |
Battery |
36 V, 20 Ah |
Base |
Laser range-finder, Sonars, IMU |
Torso |
Stereo microphones |
Arm |
Motors current feedback |
Wrist |
Force/Torque |
Head |
RGB-D camera |
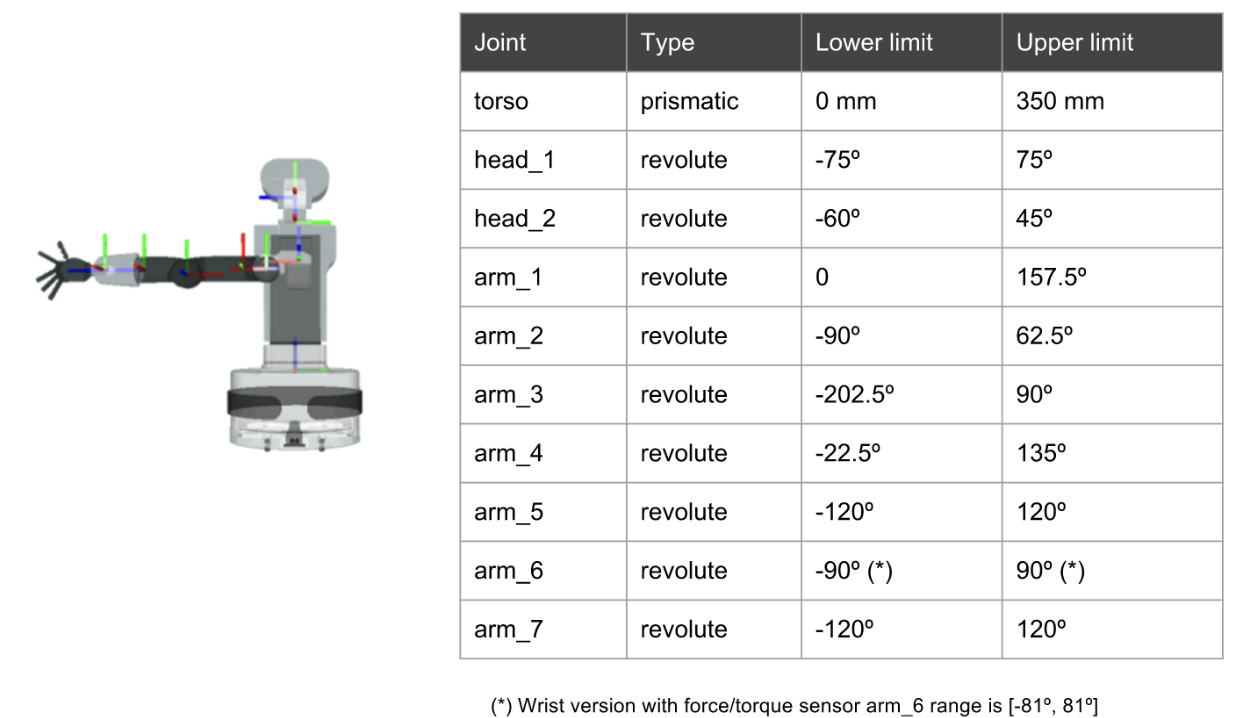
The figure below presents the kinematic specifications of TIAGo’s upper body including the motion range of each joint.
Detailed specifications:
Height |
110 – 145 cm |
Weight |
72 Kg |
Base footprint |
Ø 54 cm |
Mobile base |
2 |
Torso lift |
1 |
Arm |
4 |
Wrist |
3 |
Head |
2 |
Hey5 hand |
19 (3 actuated) |
PAL gripper |
2 |
Drive system |
Differential |
Max speed |
1 m/s |
Lift stroke |
35 cm |
Payload |
2 Kg |
Reach |
87 cm |
Battery |
36 V, 20 Ah |
Base |
Laser range-finder, Sonars, IMU |
Torso |
Stereo microphones |
Arm |
Motors current feedback |
Wrist |
Force/Torque |
Head |
RGB-D camera |
Detailed specifications:

Height |
110 - 145 cm |
Weight |
95 Kg |
Base footprint |
71 * 49 cm |
Mobile base |
3 |
Torso lift |
1 |
Arm |
4 |
Wrist |
3 |
Head |
2 |
Hey5 hand |
19 (3 actuated) |
PAL gripper |
2 |
Drive system |
Omnidirectional |
Max speed |
1 m/s |
Lift stroke |
35 cm |
Payload |
2 Kg |
Reach |
87 cm |
Battery |
2 x 36 V, 20 Ah |
Base |
2 x Laser range-finder, Sonars, IMU |
Torso |
Stereo microphones |
Arm |
Motors current feedback |
Wrist |
Force/Torque |
Head |
RGB-D camera |
Detailed specifications:
See also#
You might want to check Getting started with your robot to know more about…