ROS’s RViz#
What is RViz?#
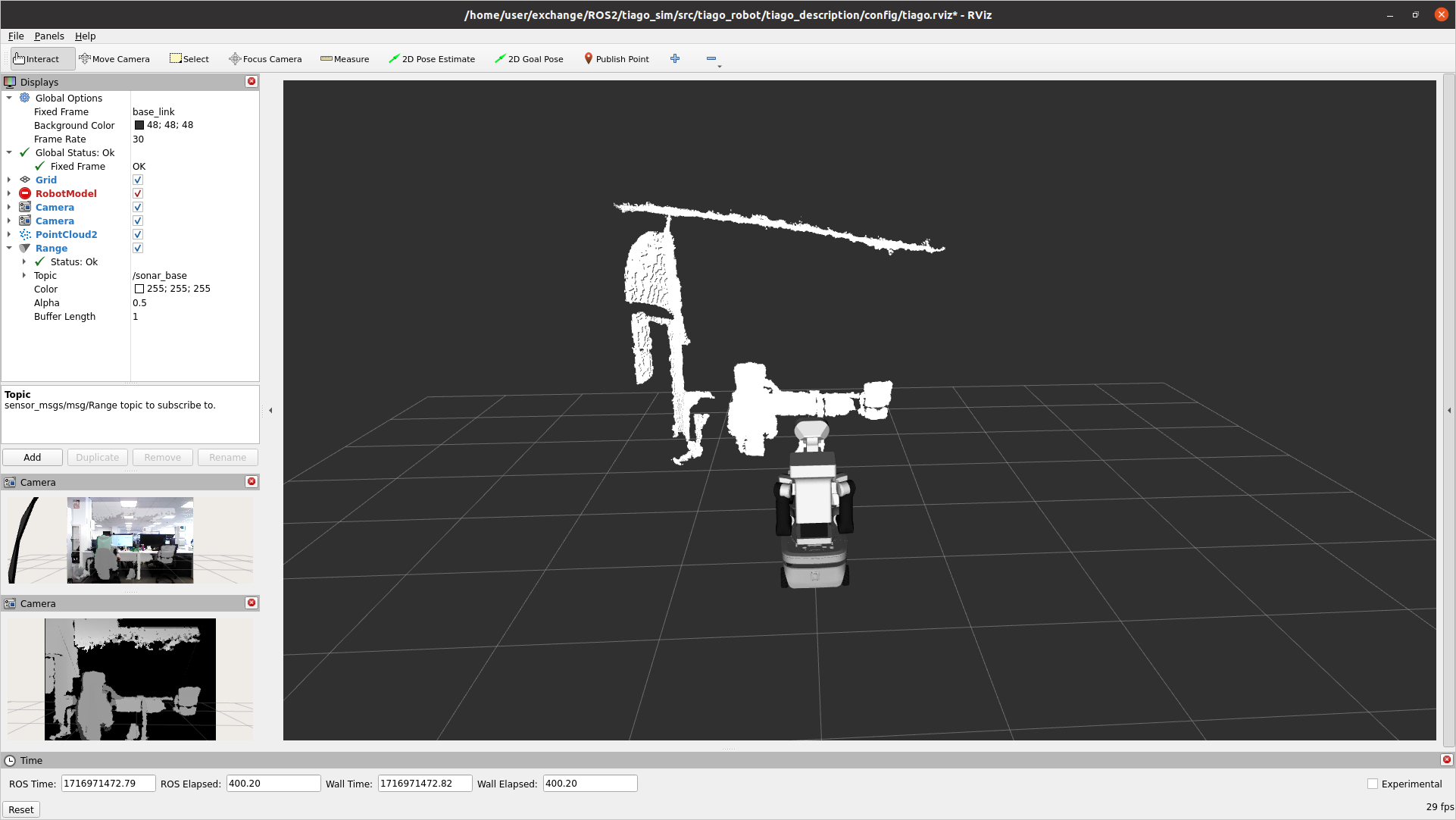
RViz is a 3D visualization tool for ROS. It provides a view of the robot model, sensors, and other information in a 3D space. It can be used to display sensor data from robots, such as point clouds, camera images, and robot models.
RViz is one of the standard GUI tools provided by ROS, alongside RQt. PAL robots are fully compatible with RViz.
You can launch the RViz GUI by running the following from your PAL OS Developer Docker container:
rviz2
RViz documentation is maintained by the ROS team. You can consult it online: RViz official documentation
Visualizing the robot’s sensors#
See Accessing your robot’s sensors for more information on how to visualize the robot’s sensors with RViz.
See also#
General information about your robot’s hardware