How-to: How to know battery life / charging#
This section contains an overview of the power-related status data reported by ari, as well as the ROS API and a brief description of the information available.
ROS API#
The robot’s power status is reported in the /power_status ROS topic.
Note
This node is launched by default on startup.
The following data is reported.
input: the voltage coming from the batteries.charger: the voltage coming from the charger.dock: the voltage coming from the dock station (not available with ari).pc: the voltage coming from the PC.charge: the percentage battery charge.is_connected: whether ari is currently connected to the charger.is_emergency: whether the emergency stop button is currently enabled.
Checking power status from robot’s terminal#
To check the power status from the terminal subscribe to the /power_status topic.
$ rostopic echo /power_status
header:
seq: 30776
stamp:
secs: 1668011001
nsecs: 544433309
frame_id: "power_status"
input: 27.6
charger: 10.1
dock: 28.2
pc: 11.8
charge: 70
is_connected: False
is_emergency: False
Checking power status from Web GUI#
Access ARI’s Web GUI interface from a web browser (phone, tablet, laptop), with
pal/pal credentials: http://ari-0c:80/
See Touchscreen for more details.
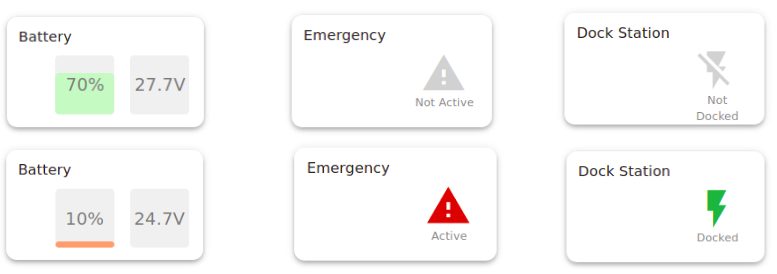
On the top right side of the HOME tab, it will indicate if the robot:
is with emergency button pressed or not
docked or not: if yes, it will light green
battery level: if higher than 20% it will be green, else red

Inside the “Information Panel” the same information is given but with more visibility.
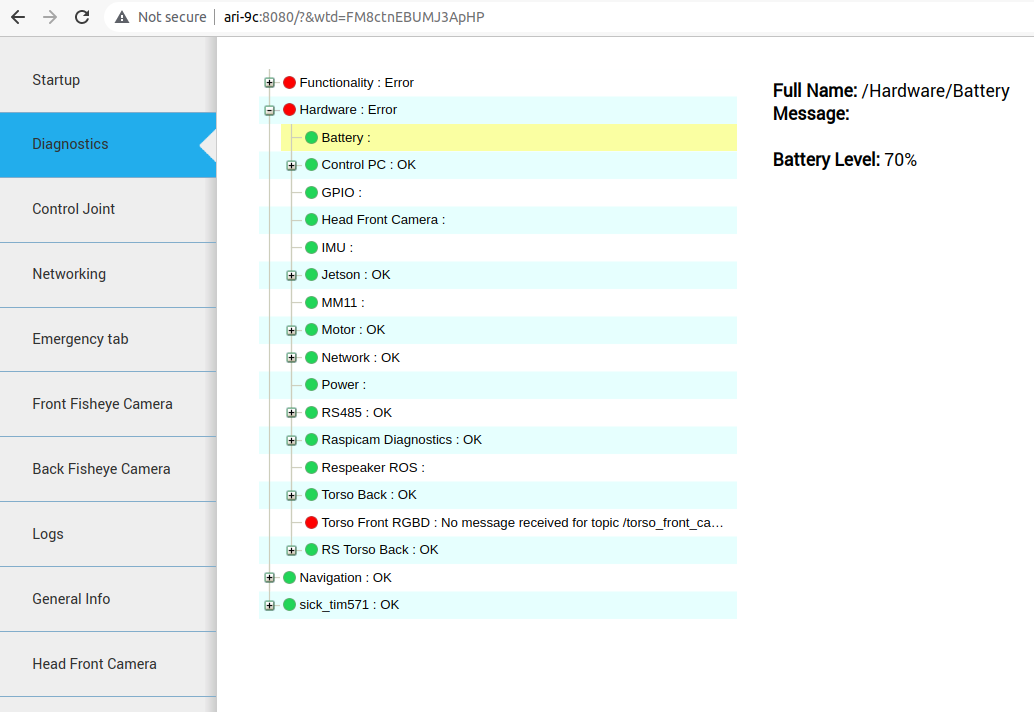
Checking power status from Web Commander#
Using the Web Commander (http://ari-0c:8080/), section, indicates the robot’s battery status. If the battery is
below 20% the Diagnostics will be red.
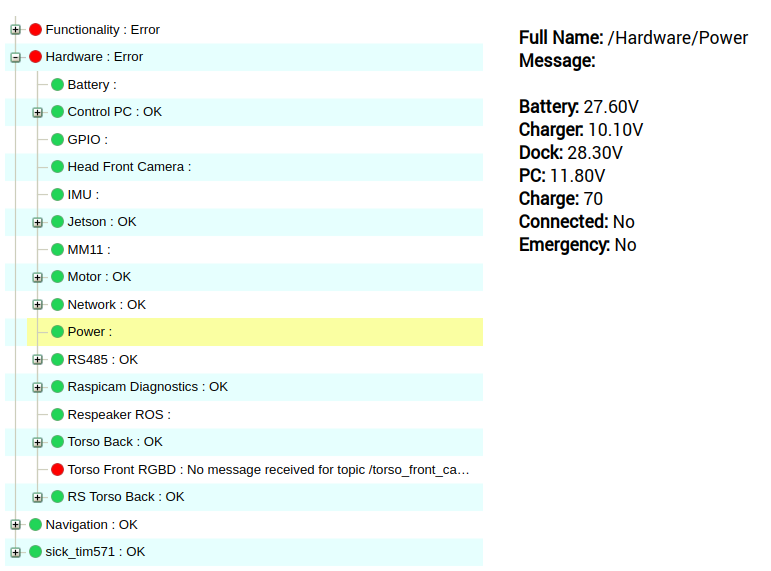
The Power section indicates if the robot is charging or not. If it is, it
will indicate Connected: Yes.
Checking power status from ARI’s ears#
As a social robot, ARI indicates some of its internal states using its LED’s. Specifically, when its battery is low, the ears will blink between yellow and red. Otherwise, by default, they will be static light yellow.
See Meaning of ARI LEDs colors and patterns for additional information on ARI’s LEDs.
Charging the robot#
If the robot’s battery is low and it is not charging, ensure to charge it following the indications of Power management.