Simulation#
Introduction to Gazebo world environments#
PAL’s robots can be simulated with the Gazebo simulator, that offers a realistic 3D environment for simulating and testing our robots. It is integrated with ROS 2 providing features like accurate physics simulation, sensors emulation and customizable environments.
Several different world environments are provided with PAL’s robots:
Empty world is loaded as default when the simulation is launched. The robot spawns in an empty world with no objects, as shown in Figure: Empty world simulated in Gazebo. In order to launch the simulation, the following instruction needs to be executed in a terminal:
source /opt/pal/${PAL_DISTRO}/setup.bash ros2 launch robot_name_gazebo robot_name_gazebo.launch.py

Figure: Empty world simulated in Gazebo#
Office world is a simple office world as shown in Figure: Small office world simulated in Gazebo can be launched with the following instruction:
source /opt/pal/${PAL_DISTRO}/setup.bash ros2 launch robot_name_gazebo robot_name_gazebo.launch.py world:=small_office
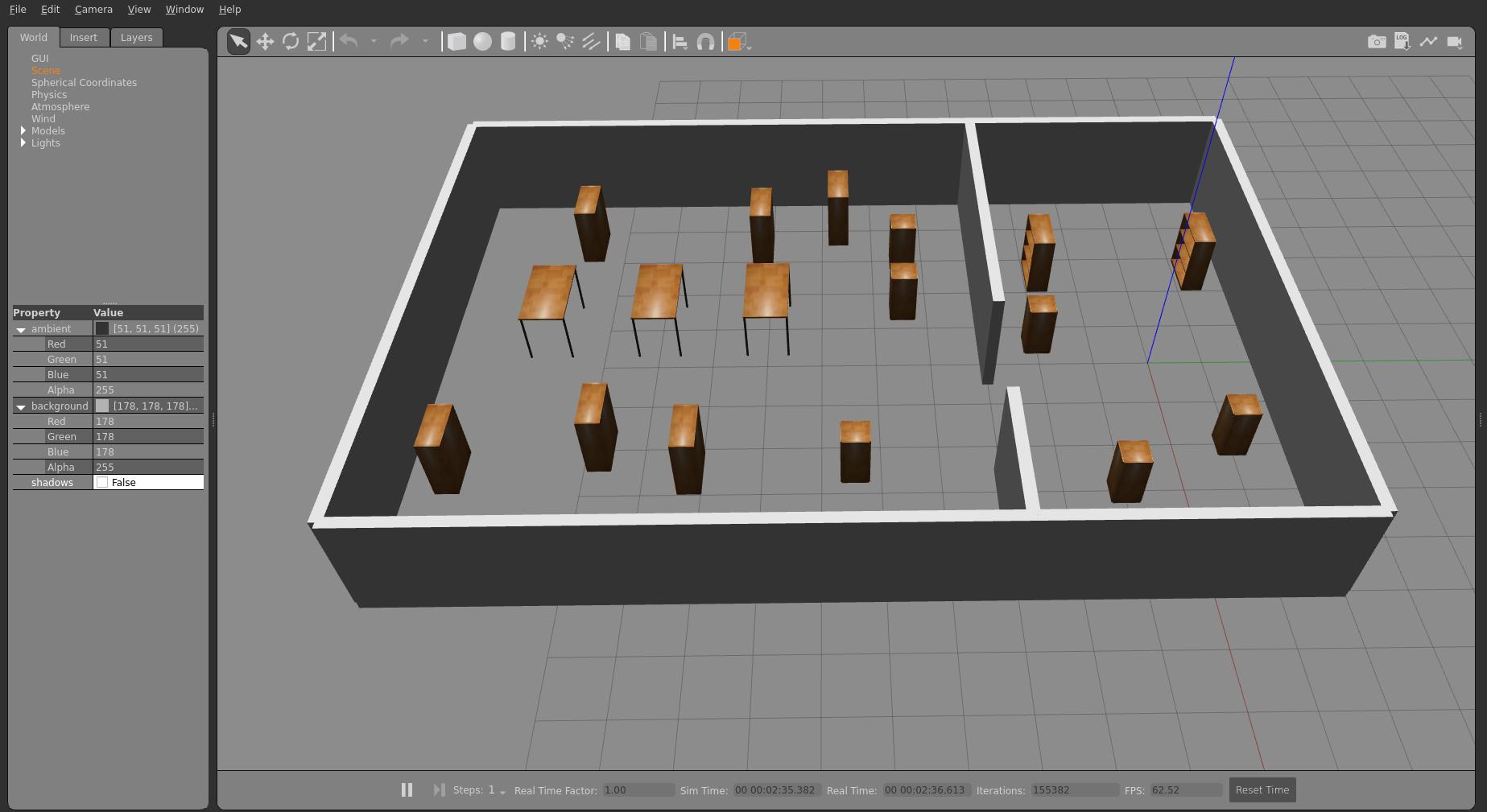
Figure: Small office world simulated in Gazebo#
PAL Gazebo worlds custom worlds are created by PAL Robotics and are also available in the
humbledistro or can be found at the following link: https://github.com/pal-robotics/pal_gazebo_worlds
PAL robots simulation#
To start TIAGo Pro using the Gazebo simulation run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch tiago_pro_gazebo tiago_pro_gazebo.launch.py

Figure: TIAGo Pro robot simulated in Gazebo#
Work in progress
To start TIAGo using the Gazebo simulation run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch tiago_gazebo tiago_gazebo.launch.py
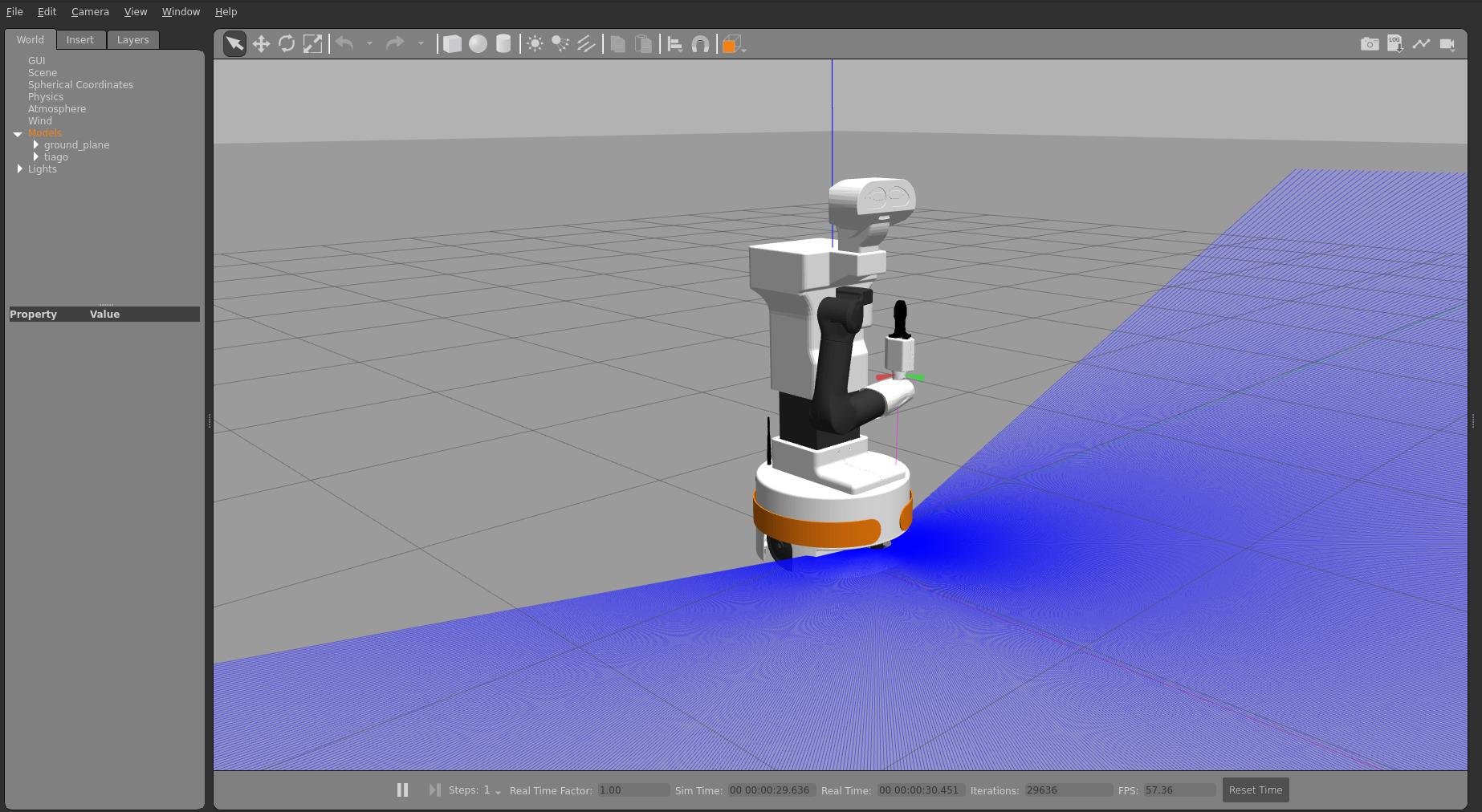
Figure: TIAGo robot simulated in Gazebo#
To start TIAGo++ using the Gazebo simulation run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch tiago_dual_gazebo tiago_dual_gazebo.launch.py
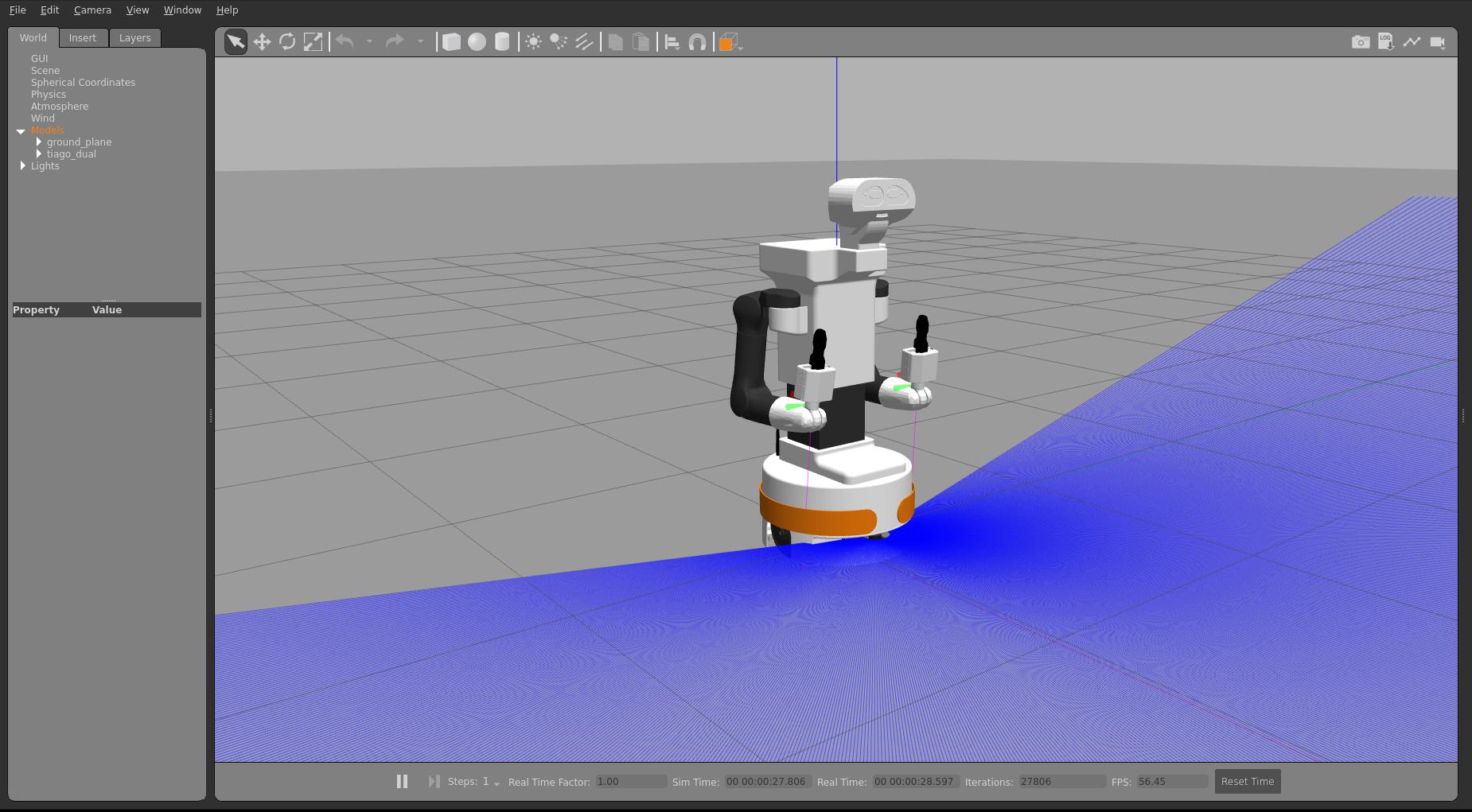
Figure: TIAGo++ robot simulated in Gazebo#
To start ARI using the Gazebo simulation run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch ari_gazebo ari_gazebo.launch.py
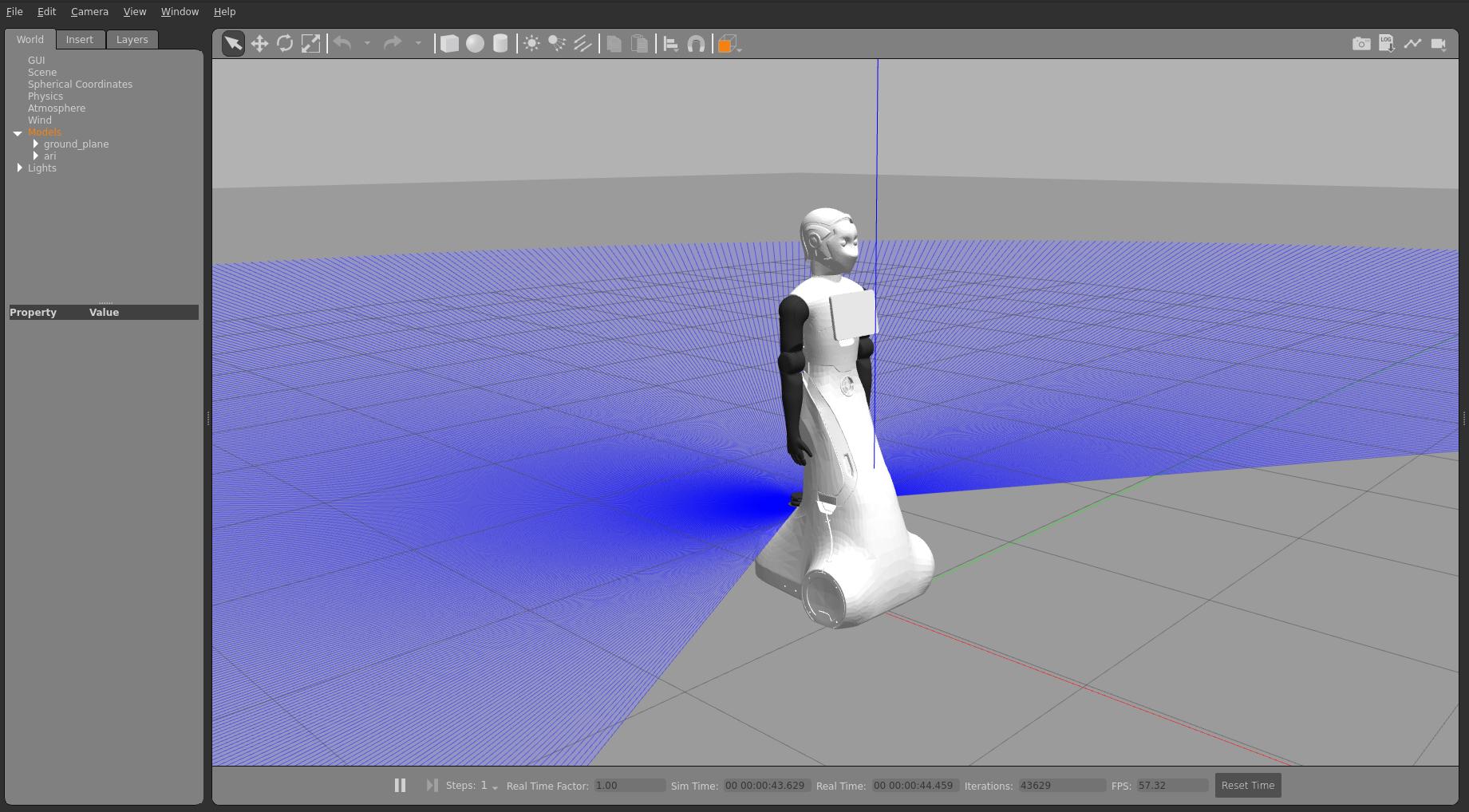
Figure: ARI robot simulated in Gazebo#
Work in progress Check TALOS instructions to install the simulator here: http://wiki.ros.org/Robots/TALOS/Tutorials/Installation/Simulation