ORO: the OpenRobots Ontology#
Your robot comes with the OpenRobots Ontology (ORO) commonsense ontology.
ORO defines a set of about 100 general concepts and 100 relations between these concepts, that are generally useful to represent knowledge about the world. They are reprensented as a knowledge graph, in the OWL/RDF format.
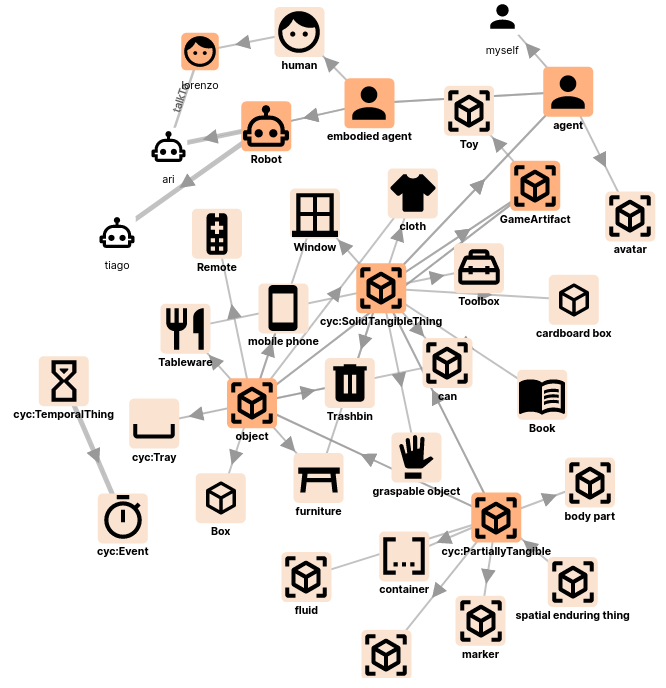
A small subset of the OpenRobots Ontology, as visualized by the Knowledge base Explorer.#
Many of ORO’s concepts are based on the OpenCyc ontology, which is a large-scale commonsense ontology, originally developed by the Cycorp company.
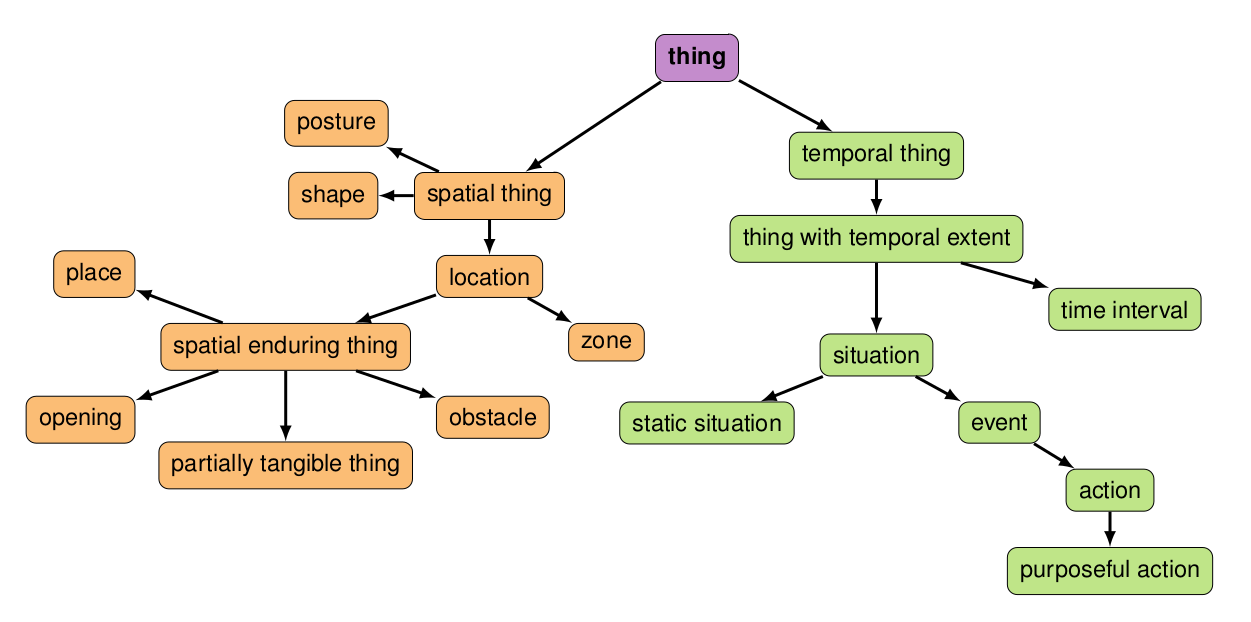
The highest-level concepts (ie, the most abstract ones) defined in the ORO ontology.#
You can explore the ORO ontology using the Knowledge Base Explorer provided with your robot, or using standard ontology editors like Protégé.
Note
By default, the ORO knowledge base is stored as a .owl file on the
robot in the /opt/pal/alum/share/oro/ontologies/ directory.
You can also interact with the ORO knowledge base directly from Python or ROS.
References#
ORO, a Knowledge Management Module for Cognitive Architectures in Robotics, S. Lemaignan, R. Ros, L. Mösenlechner, R. Alami, M. Beetz, doi: 10.1109/IROS.2010.5649547