Build a complete LLM-enabled interactive app¶
🏁 Goal of this tutorial
This tutorial will guide you through the installation and use of the ROS4HRI framework, a set of ROS nodes and tools to build interactive social robots.
We will use a set of pre-configured Docker containers to simplify the setup process.
We will also explore how a simple yet complete social robot architecture can be assembled using ROS 2, PAL Robotics’ toolset to quickly generate robot application templates, and a LLM backend.
PAL’ Social interaction simulator¶
PART 0: Preparing your environment¶
Pre-requisites¶
To follow ‘hands-on’ the tutorial, you will need to be able to run a
Docker container on your machine, with access to a X server (to display
graphical applications like rviz and rqt). We will also use the
webcam of your computer.
Any recent Linux distribution should work, as well as MacOS (with XQuartz installed).
The tutorial alo assumes that you have a basic understanding of ROS 2 concepts (topics, nodes, launch files, etc). If you are not familiar with ROS 2, you can check the official ROS 2 tutorials.
Get the public PAL tutorials Docker image¶
Fetch the PAL tutorials public Docker image:
docker pull palrobotics/public-tutorials-alum-devel:latest
Then, run the container, with access to your webcam and your X server.
xhost +
mkdir ros4hri-exchange
docker run -it --name ros4hri \
--device /dev/video0:/dev/video0 \
-e DISPLAY=$DISPLAY \
-v /tmp/.X11-unix:/tmp/.X11-unix \
-v `pwd`/ros4hri-exchange:/home/user/exchange \
--net=host \
palrobotics/public-tutorials-alum-devel:latest bash
Note
The --device option is used to pass the webcam to the
container, and the -e: DISPLAY and
-v /tmp/.X11-unix:/tmp/.X11-unix options are used to display
graphical applications on your screen.
PART 1: Warm-up with face detection¶
Start the webcam node¶
First, let’s start a webcam node to publish images from the webcam to ROS.
In the terminal, type:
ros2 run gscam gscam_node --ros-args -p gscam_config:='v4l2src device=/dev/video0 ! video/x-raw,framerate=30/1 ! videoconvert' \
-p use_sensor_data_qos:=True \
-p camera_name:=camera \
-p frame_id:=camera \
-p camera_info_url:=package://interaction_sim/config/camera_info.yaml
Note
The gscam node is a ROS 2 node that captures images from a
webcam and publishes them on a ROS topic. The gscam_config
parameter is used to specify the webcam device to use
(/dev/video0), and the camera_info_url parameter is used to
specify the camera calibration file. We use a default calibration
file that works reasonably well with most webcams.
You can open rqt to check that the images are indeed published:
rqt
Note
If you need to open another Docker terminal, run
docker exec -it -u user ros4hri bash
Then, in the Plugins menu, select Visualization > Image View,
and choose the topic /camera/image_raw:
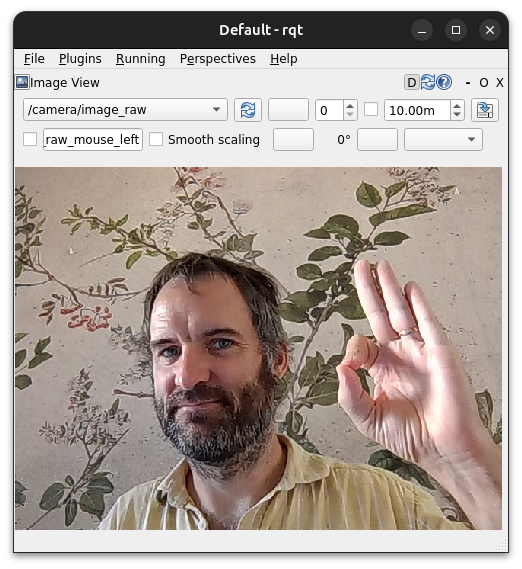
rqt image view¶
Face detection¶
hri_face_detect is an open-source ROS 1/ROS 2 node, compatible with ROS4HRI, that detects faces in images. This node is installed by default on all PAL robots.
It is already installed in the Docker container.
By default, hri_face_detect expect images on /image topic:
before starting the node, we need to configure topic remapping:
mkdir -p $HOME/.pal/config
nano $HOME/.pal/config/ros4hri-tutorials.yml
Then, paste the following content:
/hri_face_detect:
remappings:
image: /camera/image_raw
camera_info: /camera/camera_info
Press Ctrl+O to save, then Ctrl+X to exit.
Then, you can launch the node:
ros2 launch hri_face_detect face_detect.launch.py
You should see on your console which configuration files are used:
$ ros2 launch hri_face_detect face_detect.launch.py
[INFO] [launch]: All log files can be found below /home/user/.ros/log/2024-10-16-12-39-10-518981-536d911a0c9c-203
[INFO] [launch]: Default logging verbosity is set to INFO
[INFO] [launch.user]: Loaded configuration for <hri_face_detect>:
- System configuration (from lower to higher precedence):
- /opt/pal/alum/share/hri_face_detect/config/00-defaults.yml
- User overrides (from lower to higher precedence):
- /home/user/.pal/config/ros4hri-tutorials.yml
[INFO] [launch.user]: Parameters:
- processing_rate: 30
- confidence_threshold: 0.75
- image_scale: 0.5
- face_mesh: True
- filtering_frame: camera_color_optical_frame
- deterministic_ids: False
- debug: False
[INFO] [launch.user]: Remappings:
- image -> /camera/image_raw
- camera_info -> /camera/camera_info
[INFO] [face_detect-1]: process started with pid [214]
...
Note
This way of managing launch parameters and remapping is not part of base ROS 2: it is an extension (available in ROS humble) provided by PAL Robotics to simplify the management of ROS 2 nodes configuration.
See for instance the launch file of hri_face_detect to understand how it is used.
You should immediately see on the console that some faces are indeed detected
Let’s visualise them:
start
rviz2:
rviz2
In
rviz, visualize the detected faces by adding theHumansplugin, which you can find in thehri_rvizplugins group. The plugin setup requires you to specify the image stream you want to use to visualize the detection results, in this case/camera/image_raw. You can also find the plugin as one of those available for the/camera/image_rawtopic.
Important
Set the quality of service (QoS) of the
/camera/image_raw topic to Best Effort, otherwise no image will be displayed:
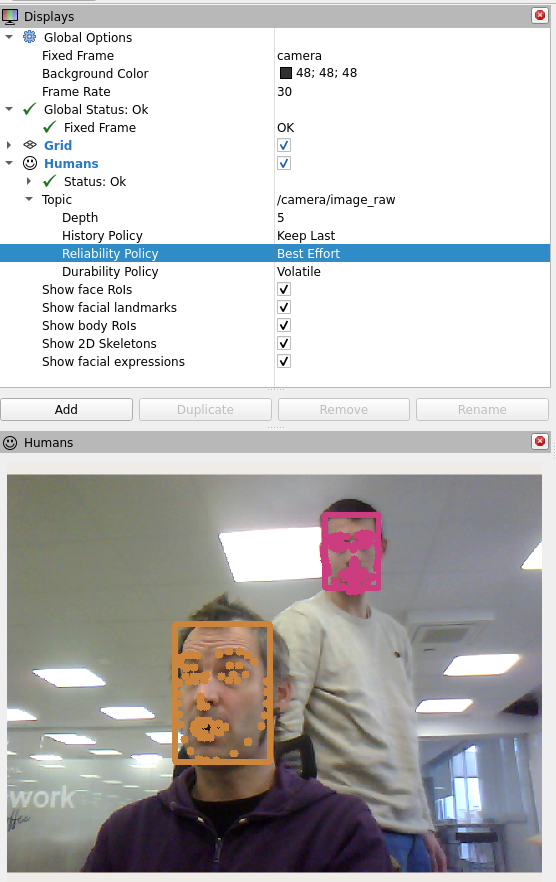
Set the QoS of the /camera/image_raw topic to Best Effort¶
In
rviz, enable as well thetfplugin, and set the fixed frame tocamera. You should now see a 3D frame, representing the face position and orientation of your face.
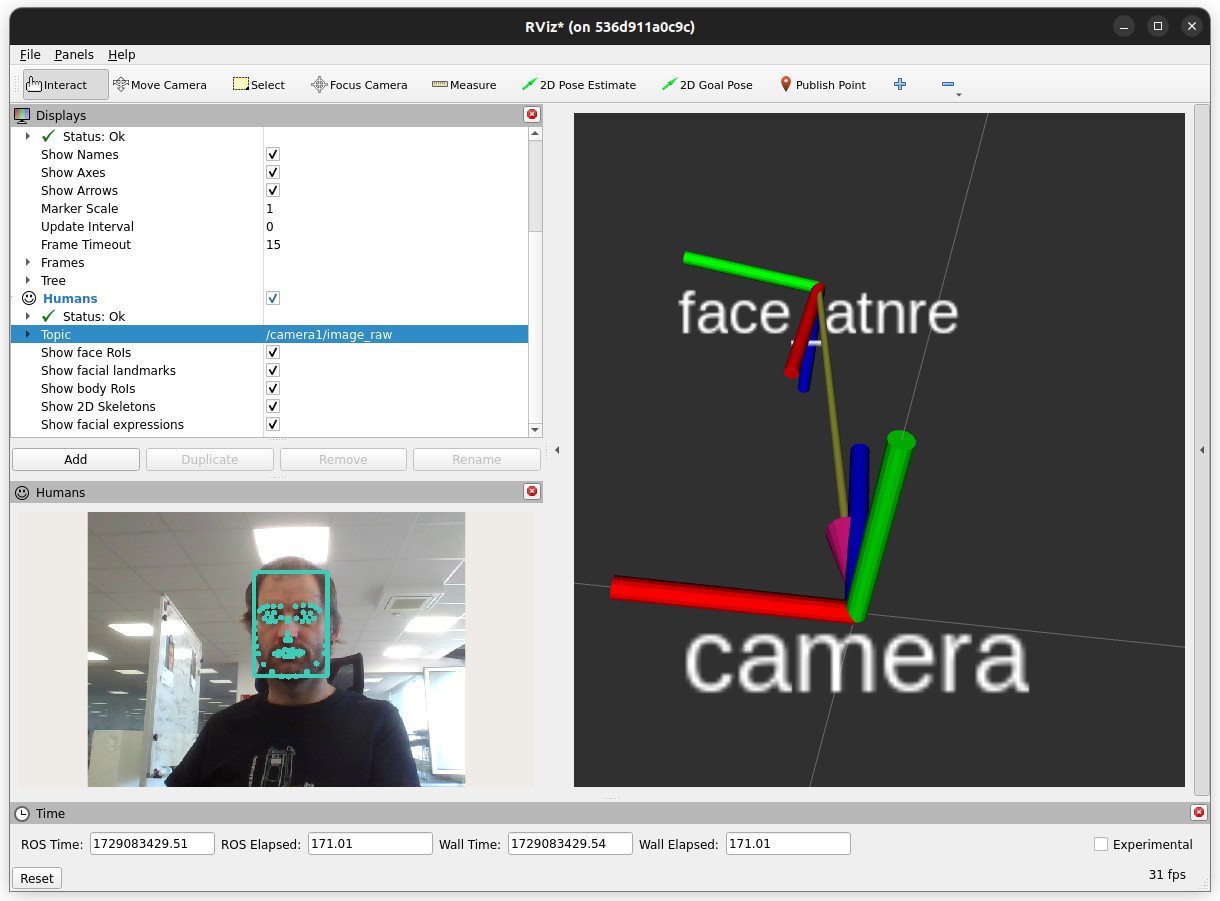
rviz showing a 3D face frame¶
📚 Learn more
This tutorial does not go much further with exploring the ROS4HRI tools and nodes. However, you can find more information:
in the 👥 Social perception section of this documentation
in the ROS4HRI wiki page
You can also check the ROS4HRI Github organisation and the original paper.
PART 2: the social interaction simulator¶
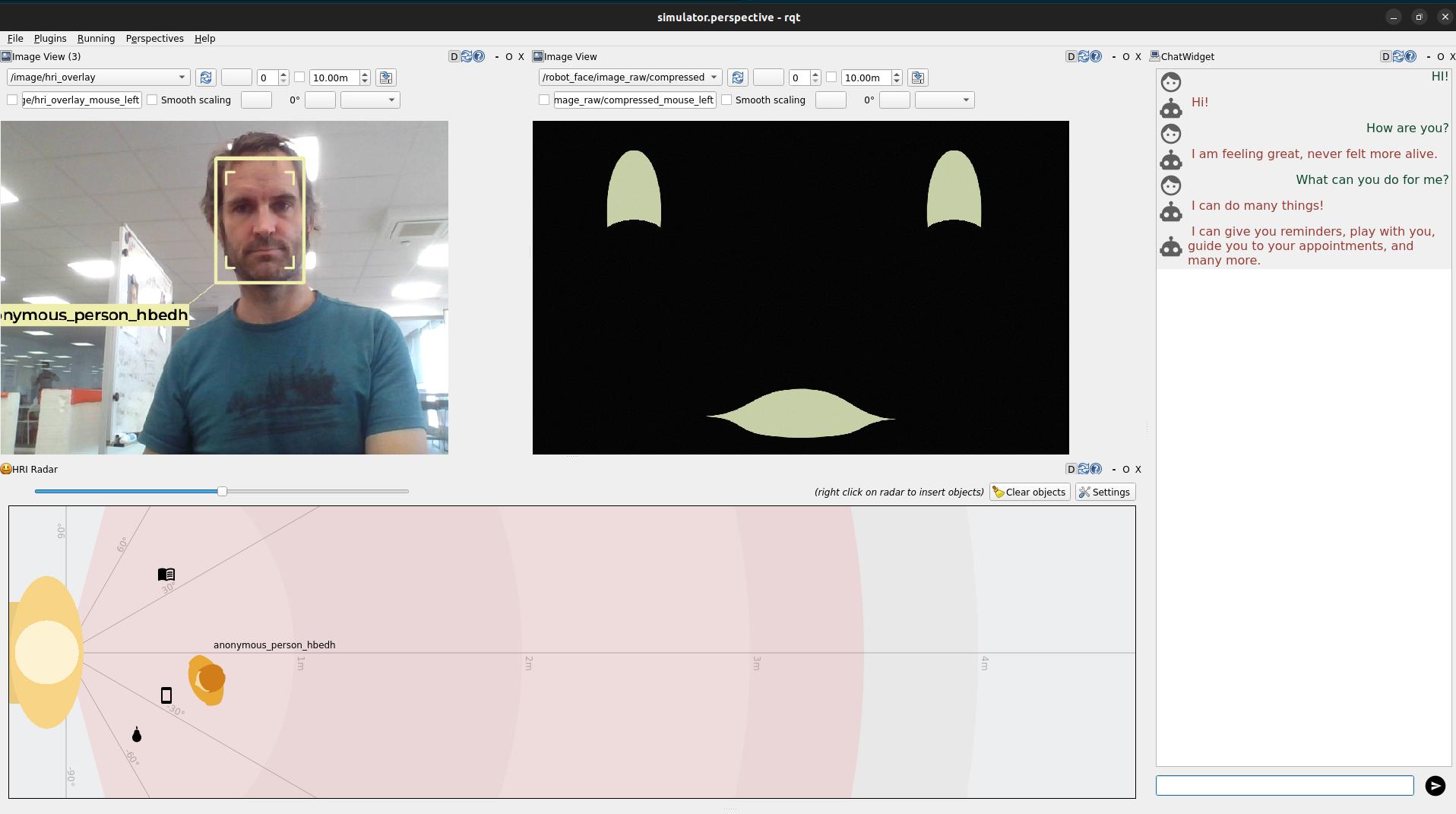
Starting the interaction simulator¶
Instead of running nodes manually, we are now going to use PAL Interaction simulator:
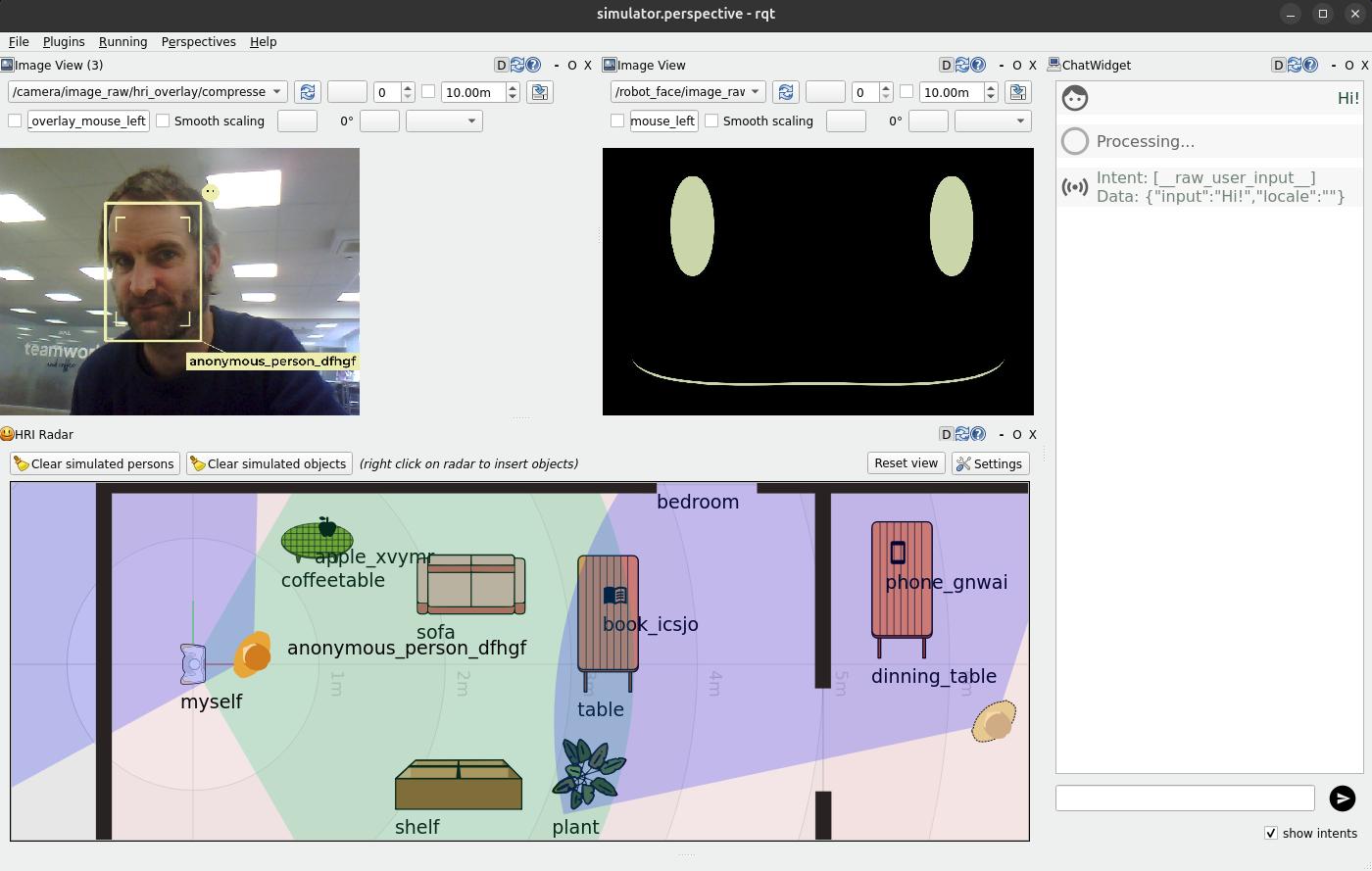
PAL’s Social interaction simulator¶
To start the simulator:
stop all the nodes that are running (like
gscam,hri_face_detect,rqt,etc)in one of your Docker terminals, launch the simulator:
ros2 launch interaction_sim simulator.launch.py
To load a pre-configured scene:
On the screenshot above, the objets (sofa, table, etc) are defined in an custom SVG file.
You can load such a pre-configured scene:
click on Settings, then Download environment SVG template and save the file in the
exchangefolder (call it for instancescene.svg).click on Load environment and select the file you just saved.
Note
You can open the SVG file in a vector editor like Inkscape to modify the scene (add new objects, change the layout, etc). Check the instructions written in the template itself.
Interaction simulator architecture¶
The interaction simulator starts several nodes:
The previous two:
gscam to publish images from the webcam
hri_face_detect to detect faces in images
And the following new nodes:
hri_person_manager, to ‘combine’ faces, bodies, voices into full persons
hri_emotion_recognizer, to recognize emotions on the detected faces
knowledge_core, an open-source OWL/RDF-based knowledge base
hri_visualization to generate a camera image overlay with the faces, bodies, emotions, etc
attention_manager(not open-source), that decides where to look based on the where the faces areexpressive_eyes(not open-source), that procedurally generates the robot’s face and moves the eyescommunication_hub(not open-source), that manages the dialogues with the user (user input speech, and robot output speech)
Finally, it launches rqt with two custom plugins:
rqt_human_radar, to visualize the detected people around the robot (and simulated interactions with a knowledge base)
rqt_chat, to chat with the robot. When you type a message, it is sent to the ROS4HRI topic
/humans/voices/anonymous_speaker/speech, and the robot’s response via the/tts_engine/ttsaction are displayed back.
The next figure shows the architecture of the interaction simulator:

Interaction simulator architecture¶
Using the simulator to add symbolic knowledge¶
When starting the simulator, knowledge_core is also started.
knowledge_core is a simple OWL/RDF-based knowledge base that can be
used to store symbolic information about the world (get more information about
💡 Knowledge and reasoning on PAL robots).
By right-clicking on the top-down view of the environment, you can add new objects to the knowledge base:
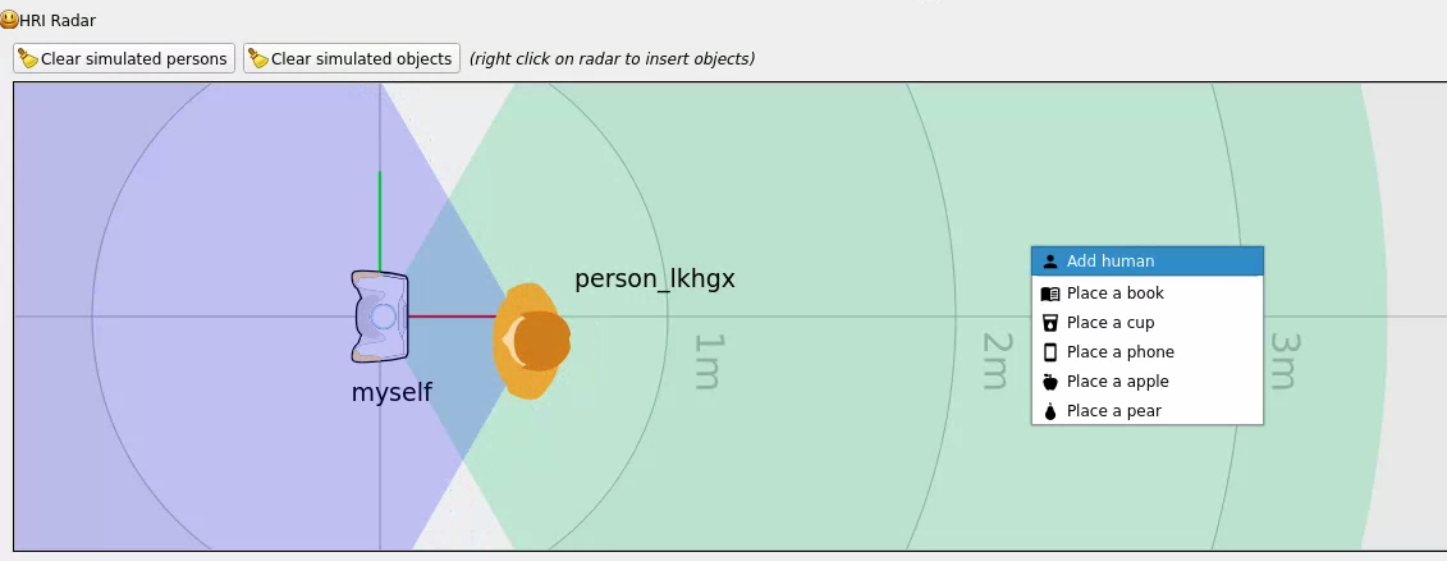
Adding a new object to the knowledge base¶
The simulator will then publish the new facts on to the knowledge base,
including whether or not a given object is in the field of view of the
robot and/or humans (eg myself sees cup_abcd or
person_lkhgx sees sofa).
To visualize the knowledge base, we can simply open a webbrowser on http://localhost:8010.
For instance, with the following scene:
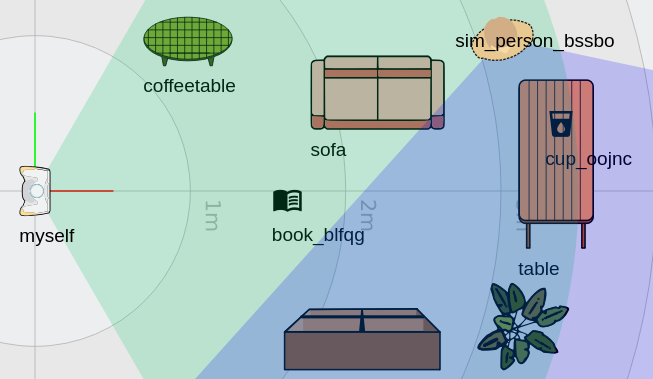
Scene with a sofa and a cup¶
the knowledge base will contain new facts, including:
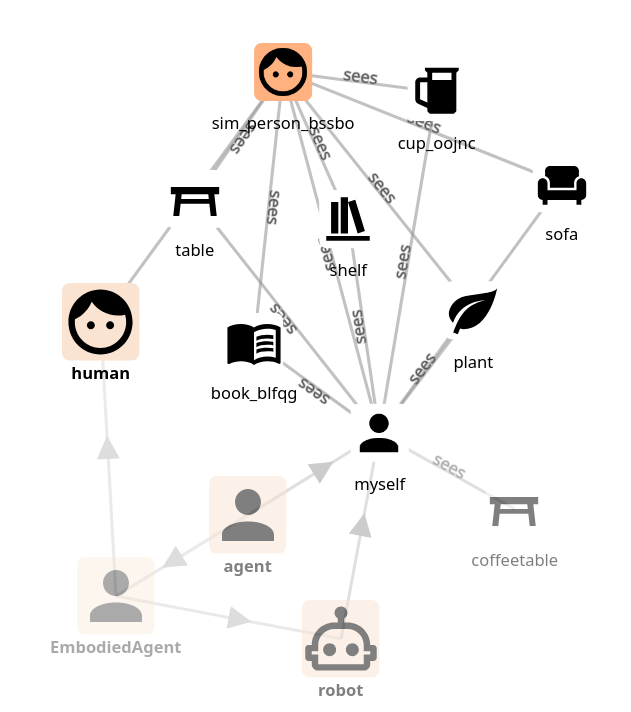
Knowledge base viewer¶
Note
The robot’s own ‘instance’ is always called myself in the
knowledge base.
For instance myself sees cup_oojnc means that the robot sees the
cup cup_oojnc.
Note
As of Feb 2025, rqt_human_radar computes and pushes to the
knowledge base the following facts:
<object|agent> rdf:type <class>myself sees <object>person_<id> sees <object><object|agent> isIn <zone><object|agent> isOn <object>
(note that the field of view of the robot/humans does not take walls into account yet!)
Accessing the knowledge base from Python¶
You can easily query the knowledge base from Python:
Start ipython3 in the terminal:
ipython3
Then, in the Python shell:
from knowledge_core.api import KB
kb = KB()
kb["* sees *"]
This will return all the facts in the knowledge base that match the
pattern * sees * (ie, all the objects that are seen by someone).
Likewise,
kb["* isIn kitchen"]
will return all the objects (or simulated humans) that are in the kitchen.
You can also create more complex queries by passing a list of semantic patterns and using named variables:
kb[["?h sees ?o", "?o rdf:type dbr:Cup", "?h rdf:type Human"]]
This will return all the facts in the knowledge base where a human sees a cup.
Note
Note the dbr: prefix in front of Cup: the simulator uses
the ‘cup’ concept defined in the DBPedia ontology.
📚 Learn more
To learn mode about PAL interaction simulator, check its complete documentation: PAL Interaction simulator.
To learn more about the knowledge base, check the 💡 Knowledge and reasoning section of this documentation.
PART 3: Building a simple social behaviour¶
Our first mission controller¶
A mission controller is a ROS node that orchestrates the robot’s behaviour.
We will implement our first mission controller as a simple Python script that copies your facial expression onto the robot’s face: an emotion mirroring game.
Since creating a complete ROS 2 node from scratch can be a bit tedious,
we will use the rpk tool, a command-line tool created by PAL
Robotics, that generates ROS 2 nodes from templates.
Note
rpk is already installed in the Docker container. You can also
install it easily on your own machines with pip install rpk
As the generator tool itself does not require ROS, you can use it on any machine, including eg Windows.
Learn more about rpk in its dedicated page: Automatic code generation with rpk.
Step 1: generating the mission controller¶
go to your
exchangefolder and create a new workspace:
cd ~/exchange
# you might have to change the rights of the folder
sudo chown user:user .
mkdir ws
cd ws
run
rpkto create the mission controller:
$ rpk create -p src/ mission
ID of your application? (must be a valid ROS identifier without spaces or hyphens. eg 'robot_receptionist')
emotion_mirror
Full name of your skill/application? (eg 'The Receptionist Robot' or 'Database connector', press Return to use the ID. You can change it later)
Choose a template:
1: base robot supervisor [python]
2: robot supervisor with pre-filled intent handlers [python]
3: robot supervisor with a GUI and pre-filled intent handlers [python]
4: complete supervisor example, using a basic chatbot to manage interactions with users [python]
5: complete supervisor example, using LLMs to manage interactions with users [python]
Your choice? 1
What robot are you targeting?
1: Generic robot (generic)
2: Generic PAL robot/simulator (generic-pal)
3: PAL ARI (ari)
4: PAL TIAGo (tiago)
5: PAL TIAGo Pro (tiago-pro)
6: PAL TIAGo Head (tiago-head)
Your choice? (default: 1: generic) 2
Choose a base robot supervisor template, and the generic-pal
robot.
The tool will then create a complete ROS 2 mission controller, ready to
listen to incoming user intents (eg, ROS messages pubished on the
/intents topic).
build and source the workspace:
colcon build
source install/setup.bash
start the mission controller:
ros2 launch emotion_mirror emotion_mirror.launch.py
If you now write a line in the rqt_chat plugin, you should see the
mission controller reacting to it:
[...]
[run_app-1] [INFO] [1729672049.773179100] [emotion_mirror]: Listening to /intents topic
[run_app-1] [INFO] [1729672099.529532393] [emotion_mirror]: Received an intent: __raw_user_input__
[run_app-1] [INFO] [1729672099.529859652] [emotion_mirror]: Processing input: __raw_user_input__
Note
rqt_chat displays ‘Processing…’ as it waits for a response
from the mission controller. The mission controller is not doing
anything yet, so nothing else will be displayed (for now!).
The intent __raw_user_input__ is emitted by the
communication_hub, and is a special intent that essentially means:
“I don’t know what to do with this input, but I received it”.
Since we are not doing anything with the input yet (like trying to figure out what the user wants be calling a dedicated chatbot), the communication hub simply sends back the same message with this intent.
Step 2: add basic interactivity¶
Modify the template to say something back. To start with, we will always respond the same thing. We can use the say to get the robot to speak.
open
mission_controller.py:
cd src/emotion_mirror/emotion_mirror
nano mission_controller.py
in the constructor, create a action client (the
sayskill:
1#...
2from rclpy.action import ActionClient
3from communication_skills.action import Say
4#...
5
6class MissionController(Node):
7 def __init__(self):
8
9 #...
10 self.say = ActionClient(self, Say, '/skill/say')
11 self.say.wait_for_server()
modify the handling on incoming intents to say something back:
1 def on_intent(self, msg):
2 #...
3
4 if msg.intent == Intent.RAW_USER_INPUT:
5 goal = Say.Goal()
6 goal.input = "I'm the famous emotion mirroring robot! (but I'm not great at chatting yet)"
7 self.say.send_goal_async(goal)
(up to you to come up with something funny!)
Re-run colcon build and relaunch your mission controller to test it
with the chat interface:
cd ~/exchange/ws # always run colcon build from the workspace root
colcon build
ros2 launch emotion_mirror emotion_mirror.launch.py
Since we are using communication_hub as a middle-man, we can also
use markup in our sentences to change the expression of the robot.
For example, you can use the following markup to display an happy face:
"<set expression(happy)> I'm the famous emotion mirroring robot! My holiday was great <set expression(amazed)>, thank you for asking! <set expression(neutral)>"
📚 Learn more
You can check the documentation of the markup language used by the communication_hub to get the list of available actions and expressions.
Step 3: emotion mimicking game¶
We can now extend our mission controller to implement our emotion mirroring game.
To get the recognised facial expression of the current user, we can use the ROS4HRI tools:
For instance:
1from hri import HRIListener
2
3hri_listener = HRIListener("mimic_emotion_hrilistener")
4
5for face_id, face in hri_listener.faces.items():
6 if face.expression:
7 print(f"Face {face_id} shows expression {face.expression}")
Then, we can set the same expression onto the robot face, using the set_expression:
1from rclpy.qos import QoSProfile
2from interaction_skills.msg import SetExpression
3
4expression_pub = self.create_publisher(SetExpression, "/skill/set_expression", QoSProfile(depth=10))
5
6msg = SetExpression()
7msg.expression.expression = "happy" # see Expression.msg for all available expressions
8expression_pub.publish(msg)
Modify the mission controller to add a background ‘job’ of checking for people’s face, and accordingly set the robot’s expression:
Add a run() method at the bottom of your mission controller:
1def run(self) -> None:
2
3 self.get_logger().info("Checking expressions...")
4
5 faces = list(self.hri_listener.faces.items())
6 if faces:
7 # only consider the first detected face
8 face_id, face = faces[0]
9 if face.expression:
10 expression = face.expression.name.lower()
11 print(f"Face {face_id} shows expression {expression}")
12
13 msg = SetExpression()
14 msg.expression.expression = expression
15 self.expression_pub.publish(msg)
Then, in the __init__ constructor, create the HRI listener, the
expression publisher, and a timer to regularly call the run()
method:
1from rclpy.qos import QoSProfile
2from interaction_skills.msg import SetExpression
3
4def __init__(self):
5
6
7 # ...
8
9 self.hri_listener = HRIListener("mimic_emotion_hrilistener")
10 self.expression_pub = self.create_publisher(SetExpression, "/skill/set_expression", QoSProfile(depth=10))
11
12 self._timer = self.create_timer(0.1, self.run) # check at 10Hz
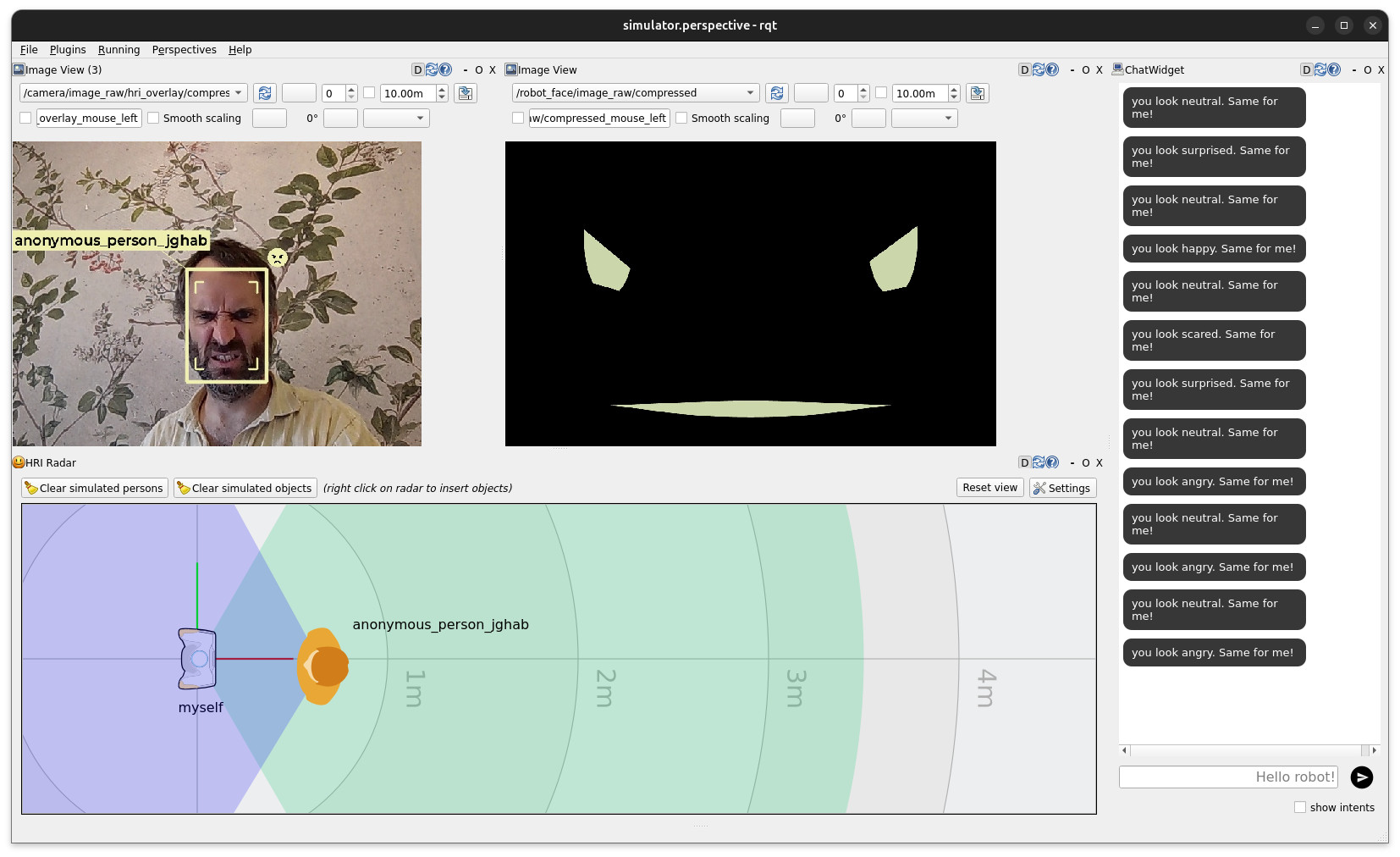
The robot detects the ‘angry’ expression, and mimicks it.¶
The final complete script should look like:
1import json
2
3from rclpy.node import Node
4from rclpy.qos import QoSProfile
5from rclpy.action import ActionClient
6
7from hri_actions_msgs.msg import Intent
8from interaction_skills.msg import SetExpression
9from communication_skills.action import Say
10from hri import HRIListener
11
12class MissionController(Node):
13
14 def __init__(self) -> None:
15 super().__init__('app_emotion_mirror')
16
17 self.get_logger().info("Initialising...")
18
19 self._intents_sub = self.create_subscription(
20 Intent,
21 '/intents',
22 self.on_intent,
23 10)
24 self.get_logger().info("Listening to %s topic" %
25 self._intents_sub.topic_name)
26
27 self.hri_listener = HRIListener("mimic_emotion_hrilistener")
28 self.expression_pub = self.create_publisher(SetExpression, "/skill/set_expression", QoSProfile(depth=10))
29 self.last_expression = ""
30
31 self.say = ActionClient(self, Say, '/skill/say')
32 self.say.wait_for_server()
33
34 self._timer = self.create_timer(0.1, self.run) # check at 10Hz
35
36 def __del__(self):
37 self.get_logger().info("Destroying Mission Controller")
38 self.destroy_subscription(self._intents_sub)
39
40 def on_intent(self, msg) -> None:
41
42 self.get_logger().info("Received an intent: %s" % msg.intent)
43
44 data = json.loads(msg.data) if msg.data else {} # noqa: F841
45 source = msg.source # noqa: F841
46 modality = msg.modality # noqa: F841
47 confidence = msg.confidence # noqa: F841
48 priority_hint = msg.priority # noqa: F841
49
50 if msg.intent == Intent.RAW_USER_INPUT:
51 self.get_logger().info(f"Processing input: {msg.intent} -> {data}")
52 goal = Say.Goal()
53 goal.input = "I'm the famous emotion mirroring robot!"
54 self.say.send_goal_async(goal)
55 else:
56 self.get_logger().warning("I don't know how to process intent "
57 "<%s>!" % msg.intent)
58 def run(self) -> None:
59
60 faces = list(self.hri_listener.faces.items())
61 if faces:
62 # only consider the first detected face
63 face_id, face = faces[0]
64 if face.expression and face.expression != self.last_expression:
65 expression = face.expression.name.lower()
66 print(f"Face {face_id} shows expression {expression}")
67
68 goal = Say.Goal()
69 goal.input = f"you look {expression}. Same for me!"
70 self.say.send_goal_async(goal)
71
72 msg = SetExpression()
73 msg.expression.expression = expression
74 self.expression_pub.publish(msg)
75
76 self.last_expression = face.expression
PART 4: Integration with LLMs¶
Adding a chatbot¶
Step 1: creating a chatbot¶
use
rpkto create a newchatbotskill using the basic chabot intent extraction template:
$ rpk create -p src intent
ID of your application? (must be a valid ROS identifier without spaces or hyphens. eg 'robot_receptionist')
chatbot
Full name of your skill/application? (eg 'The Receptionist Robot' or 'Database connector', press Return to use the ID. You can change it later)
Choose a template:
1: basic chatbot template [python]
2: complete intent extraction example: LLM bridge using the OpenAI API (ollama, chatgpt) [python]
Your choice? 1
What robot are you targeting?
1: Generic robot (generic)
2: Generic PAL robot/simulator (generic-pal)
3: PAL ARI (ari)
4: PAL TIAGo (tiago)
5: PAL TIAGo Pro (tiago-pro)
6: PAL TIAGo Head (tiago-head)
Your choice? (default: 1: generic) 2
Compile the chatbot:
colcon build
source install/setup.bash
Then, start your chatbot:
ros2 launch chatbot chatbot.launch.py
If you now type a message in the rqt_chat plugin, you should see
the chatbot responding to it:
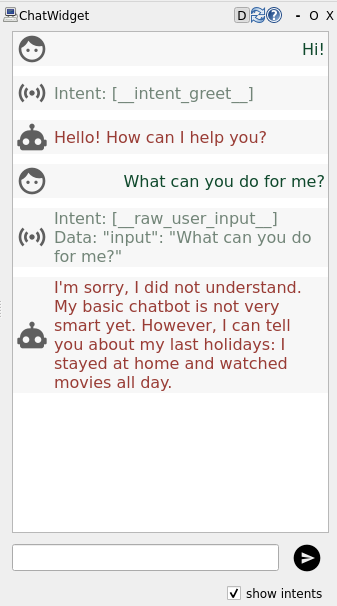
Chatbot responding to a message¶
If you tick the checkbox at the bottom, you can also see in the chat window the
intents that the chatbot has identified in the user input. For now, our basic
chatbot only recognises the __intent_greet__ intent when you type Hi or
Hello.
Step 2: integrating the chatbot with the mission controller¶
To fully understand the intent pipeline, we will modify the chatbot to recognise a ‘pick up’ intent, and the mission controller to handle it.
open
chatbot/node_impl.pyand modify your chatbot to check whether incoming speech matches[please] pick up [the] <object>:
1import re
2
3class BasicChatbot(Node):
4
5 # [...]
6
7 def contains_pickup(self, sentence):
8 sentence = sentence.lower()
9
10 # matches sentences like: [please] pick up [the] <object> and return <object>
11 pattern = r"(?:please\s+)?pick\s+up\s+(?:the\s+)?(\w+)"
12 match = re.search(pattern, sentence)
13 if match:
14 return match.group(1)
then, in the
on_dialogue_interactionmethod, check if the incoming speech matches the pattern, and if so, return a__intent_grab_object__(see Intents for more details about intents and their expected parameters):
1def on_dialogue_interaction(self, request, response):
2
3 #...
4
5 pick_up_object = self.contains_pickup(input)
6
7 if pick_up_object:
8 self.get_logger().warn(f"I think the user want to pick up a {pick_up_object}. Sending a GRAB_OBJECT intent")
9 intents.append(Intent(intent=Intent.GRAB_OBJECT,
10 data=json.dumps({"object": pick_up_object}),
11 source=user_id,
12 modality=Intent.MODALITY_SPEECH,
13 confidence=.8))
14 suggested_response = f"Sure, let me pick up this {pick_up_object}"
15
16
17 # elif ...
Note
the Intent message is defined in the hri_actions_msgs
package, and contains the intent, the data associated with the
intent, the source of the intent (here, the current user_id), the
modality (here, speech), and the confidence of the recognition.
Check the Intents documentation for details, or directly the Intent.msg definition.
Test your updated chatbot by recompiling the workspace
(colcon build) and relaunching the chatbot.
If you now type pick up the cup in the chat window, you should see
the chatbot recognising the intent and sending a GRAB_OBJECT intent
fo the mission controller.
finally, modify the mission controller function handling inbound intents, in order to manage the
GRAB_OBJECTintent. Openemotion_mirror/mission_controller.pyand modify theon_intentmethod to handle theGRAB_OBJECTintent:1def on_intent(self, msg): 2 #... 3 4 if msg.intent == Intent.GRAB_OBJECT: 5 # on a real robot, you would call here a manipulation skill 6 goal = Say.Goal() 7 goal.input = f"<set expression(tired)> That {data['object']} is really heavy...! <set expression(neutral)>" 8 self.say.send_goal_async(goal) 9 10 # ...
Re-compile and re-run the mission controller. If you now type
pick up the cup in the chat window, you should see the mission
controller reacting to it.
📚 Learn more
In this example, we directly use the say skill to respond to the user.
When developing a full application, you usually want to split your architecture into multiple nodes, each responsible for a specific task.
The PAL application model, based on the RobMoSys methodology, encourages the development of a single mission controller, and a series of tasks and skills that are orchestrated by the mission controller.
You can read more about this model here: 📝 Developing robot apps.
Integrating with a Large Language Model (LLM)¶
Next, let’s integrate with an LLM.
Step 1: install ollama¶
ollama is an open-source tool that provides a simple REST API to
interact with a variety of LLMs. It makes it easy to install different
LLMs, and to call them using the same REST API as, eg, OpenAI’s ChatGPT.
To install ollama on your machine, follow the instructions on the
official repository:
Note
For convenience, we recommend to install ollama outside of your Docker
environment, on your host machine directly.
curl -fsSL https://ollama.com/install.sh | sh
Once it is installed, you can start the ollama server with:
ollama serve
Open a new terminal, and run the following command to download a first model and check it works:
ollama run gemma3:1b
Note
Visit the ollama model page to see the list of available models.
Depending on the size of the model and your computer configuration, the response time can be quite long.
Having a fast GPU helps :-)
Step 2: calling ollama from the chatbot¶
ollama can be accessed from your code either by calling the REST API
directly, or by using the ollama Python binding. While the REST API
is more flexible (and makes it possible to easily use other
OpenAI-compatible services, like ChatGPT), the Python binding is very
easy to use.
Note
If you are curious about the REST API, use rpk LLM chatbot
template to generate an example of a chatbot that calls ollama
via the REST API.
install the
ollamapython binding inside your Docker image:pip install ollama
Modify your chatbot to connect to
ollama, using a custom prompt. Openchatbot/chatbot/node_impl.pydo the following changes:
1# add to the imports
2from ollama import Client
3
4# ...
5
6class BasicChatbot(Node):
7
8 # modify the constructor:
9 def __init__(self) -> None:
10 # ...
11
12 self._ollama_client = Client()
13 # if ollama does not run on the local host, you can specify the host and
14 # port. For instance:
15 # self._ollama_client = Client("x.x.x.x:11434")
16
17 # dialogue history
18 self.messages = [
19 {"role": "system",
20 "content": """
21 You are a helpful robot, always eager to help.
22 You always respond with concise and to-the-point answers.
23 """
24 }]
25
26 # ...
27
28 # modify on_dialogue_interaction:
29 def on_dialogue_interaction(self,
30 request: DialogueInteraction.Request,
31 response: DialogueInteraction.Response):
32
33 # we can have multiple dialogues: we use the dialogue_id to
34 # identify to which conversation this new input belongs
35 target_dialogue_id = request.dialogue_id
36
37 user_id = request.user_id
38 input = request.input
39
40 # response_expected might be False if, for instance, the robot
41 # itself is saying something. It might be useful to add it to
42 # the dialogue history with the user, but we do not need to
43 # generate a response.
44 response_expected = request.response_expected
45 suggested_response = ""
46 intents = []
47
48 self.get_logger().info(f"input from {user_id} to dialogue {target_dialogue_id}: {input}")
49 self._nb_requests += 1
50
51 self.messages.append({"role": "user", "content": input})
52
53 llm_res = self._ollama_client.chat(
54 messages=self.messages,
55 model="gemma3:1b"
56 )
57
58 content = llm_res.message.content
59
60 self.get_logger().info(f"The LLM answered: {content}")
61
62 self.messages.append({"role": "assistant", "content": content})
63
64 response.response = content
65 response.intents = []
66 return response
As you can see, calling ollama is as simple as creating a Client
object and calling its chat method with the messages to send to the
LLM and the model to use.
In this example, we append to the chat history (self.messages) the
user input and the LLM response after each interaction, thus building a
complete dialogue.
Recompile and restart the chatbot. If you now type a message in the chat window, you should see the chatbot responding with a text generated by the LLM:
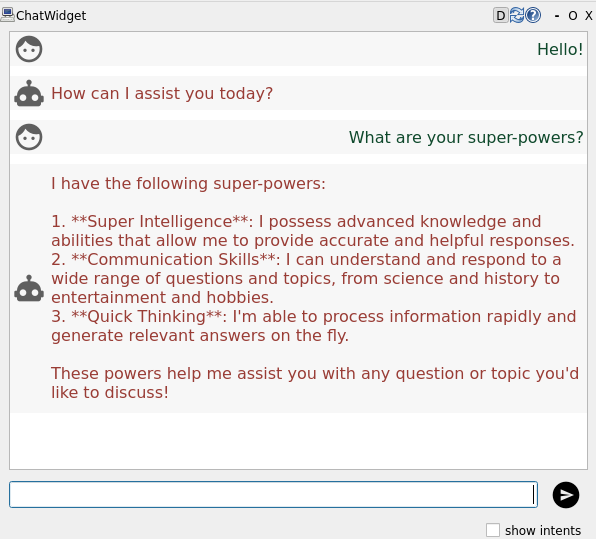
Example of a chatbot response generated by an LLM (in this example, Phi4)¶
Attention
Depending on the LLM model you use, the response time can be quite
long. By default, after 10s, communication_hub will time out. In that
case, the chatbot answer will not be displayed in the chat window.
Step 3: extract user intents¶
To recognise intents from the LLM response, we can use a combination of prompt engineering and LLM structured output.
to generate structured output (ie, a JSON-structured response that includes the recognised intents), we first need to write a Python object that corresponds to the expected output of the LLM:
1from pydantic import BaseModel
2from typing import Literal
3from hri_actions_msgs.msg import Intent
4
5# Define the data models for the chatbot response and the user intent
6class IntentModel(BaseModel):
7 type: Literal[Intent.BRING_OBJECT,
8 Intent.GRAB_OBJECT,
9 Intent.PLACE_OBJECT,
10 Intent.GUIDE,
11 Intent.MOVE_TO,
12 Intent.SAY,
13 Intent.GREET,
14 Intent.START_ACTIVITY,
15 ]
16 object: str | None
17 recipient: str | None
18 input: str | None
19 goal: str | None
20
21class ChatbotResponse(BaseModel):
22 verbal_ack: str | None
23 user_intent: IntentModel | None
Here, we use the type BaseModel from the pydantic library so
that we can generate the formal model corresponding to this Python
object (using the JSON schema specification).
then, modify the chatbot to force the LLM to return a JSON-structured response that includes the recognised intents:
1 # ...
2 def on_dialogue_interaction(self,
3 request: DialogueInteraction.Request,
4 response: DialogueInteraction.Response):
5
6 target_dialogue_id = request.dialogue_id
7 user_id = request.user_id
8 input = request.input
9 response_expected = request.response_expected
10 suggested_response = ""
11 intents = []
12
13 self.get_logger().info(f"input from {user_id} to dialogue {target_dialogue_id}: {input}")
14 self._nb_requests += 1
15
16 self.messages.append({"role": "user", "content": input})
17
18 llm_res = self._ollama_client.chat(
19 messages=self.messages,
20 model="gemma3:1b",
21 format=ChatbotResponse.model_json_schema() # <- the magic happens here
22 )
23
24 json_res = ChatbotResponse.model_validate_json(llm_res.message.content)
25
26 self.get_logger().info(f"The LLM answered: {json_res}")
27
28 verbal_ack = json_res.verbal_ack
29 if verbal_ack:
30 # if we have a verbal acknowledgement, add it to the dialogue history,
31 # and send it to the user
32 self.messages.append({"role": "assistant", "content": verbal_ack})
33 response.response = verbal_ack
34
35 user_intent = json_res.user_intent
36 if user_intent:
37 response.intents = [Intent(
38 intent=user_intent.type,
39 data=json.dumps(user_intent.model_dump())
40 )]
41
42 return response
Now, the LLM will always return a JSON-structured response that includes
an intent (if one was recognised), and a verbal acknowledgement. For
instance, when asking the robot to bring an apple, it returns an
intent PLACE_OBJECT with the object apple:
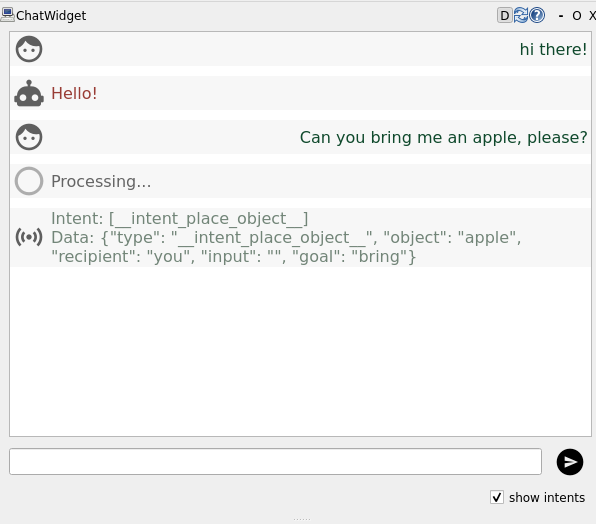
Example of a structured LLM response¶
Step 4: prompt engineering to improve intent recognition¶
To improve the intent recognition, we can use prompt engineering: we can provide the LLM with a prompt that will guide it towards generating a response that includes the intents we are interested in.
One key trick is to provide the LLM with examples of the intents we are interested in.
Here an example of a longer prompt, that would yield better results:
PROMPT = """
You are a friendly robot called $robot_name. You try to help the user to the best of your abilities.
You are always helpful, and ask further questions if the desires of the user are unclear.
Your answers are always polite yet concise and to-the-point.
Your aim is to extract the user goal.
Your response must be a JSON object with the following fields (both are optional):
- verbal_ack: a string acknowledging the user request (like 'Sure', 'I'm on it'...)
- user_intent: the user overall goal (intent), with the following fields:
- type: the type of intent to perform (e.g. "__intent_say__", "__intent_greet__", "__intent_start_activity__", etc.)
- any thematic role required by the intent. For instance: `object` to
relate the intent to the object to interact with (e.g. "lamp",
"door", etc.)
Importantly, `verbal_ack` is meant to be a *short* acknowledgement sentence,
unconditionally uttered by the robot, indicating that you have understood the request -- or that we need more information.
For more complex verbal actions, return a `__intent_say__` instead.
However, for answers to general questions that do not require any action
(eg: 'what is your name?'), the 'user_intent' field can be omitted, and the
'verbal_ack' field should contain the answer.
The user_id of the person you are talking to is $user_id. Always use this ID when referring to the person in your responses.
Examples
- if the user says 'Hello robot', you could respond:
{
"user_intent": {"type": "__intent_greet__", "recipient": "$user_id"}
}
- if the user says 'What is your name?', you could respond:
{
"verbal_ack":"My name is $robot_name. What is your name?"
}
- if the user say 'take a fruit', you could respond (assuming a object 'apple1' of type 'Apple' is visible):
{
"user_intent": {
"type":"__intent_grab_object__",
"object":"apple1",
},
"verbal_ack": "Sure"
}
- if the user say 'take a fruit', but you do not know about any fruit. You could respond:
{
"verbal_ack": "I haven't seen any fruits around. Do you want me to check in the kitchen?"
}
- the user says: 'clean the table'. You could return:
{
"user_intent": {
"type":"__intent_start_activity__",
"object": "cleaning_table"
},
"verbal_ack": "Sure, I'll get started"
}
If you are not sure about the intention of the user, return an empty user_intent and ask for confirmation with the verbal_ack field.
"""
This prompt uses Python’s templating system to include the robot’s name and the user’s ID in the prompt.
You can use this prompt in your script by substituting the variables with the actual values:
from string import Template
actual_prompt = Template(PROMPT).safe_substitute(robot_name="Robbie", user_id="Alice")
Then, you can use this prompt in the ollama call:
# ...
def __init(self) -> None:
# ...
self.messages = [
{"role": "system",
"content": Template(PROMPT).safe_substitute(robot_name="Robbie", user_id="user1")
}]
# ...
Closing the loop: integrating LLM and symbolic knowledge representation¶
Finally, we can use the knowledge base to improve the intent recognition.
For instance, if the user asks the robot to bring the apple, we can
use the knowledge base to check whether an apple is in the field of view
of the robot.
Note
It is often convenient to have a Python interpreter open to quickly test knowledge base queries.
Open ipython3 in a terminal from within your Docker image, and
then:
from knowledge_core.api import KB; kb = KB()
kb["* sees *"] # etc.
First, let’s query the knowledge base for all the objects that are visible to the robot:
1from knowledge_core.api import KB
2
3# ...
4
5def __init__(self) -> None:
6
7 # ...
8
9 self.kb = KB()
10
11
12def environment(self) -> str:
13 """ fetch all the objects and humans visible to the robot,
14 get for each of them their class and label, and return a string
15 that list them all.
16
17 A more advanced version could also include the position of the objects
18 and spatial relations between them.
19 """
20
21 environment_description = ""
22
23 seen_objects = self.kb["myself sees ?obj"]
24 for obj in [item["obj"] for item in seen_objects]:
25 details= self.kb.details(obj)
26 label= details["label"]["default"]
27 classes= details["attributes"][0]["values"]
28 class_name= None
29 if classes:
30 class_name= classes[0]["label"]["default"]
31 environment_description += f"- I see a {class_name} labeled {label}.\n"
32 else:
33 environment_description += f"- I see {label}.\n"
34
35 self.get_logger().info(
36 f"Environment description:\n{environment_description}")
37 return environment_description
Note
The kb.details method returns a dictionary with details about
a given knowledge concept. The attributes field contains e.g. the
class of the object (if known or inferred by the knowledg base).
📚 Learn more
To inspect in details the knowledge base, we recommend using Protégé, an open-source tool to explore and modify ontologies.
The ontology used by the robot (and the interaction simulator) is
stored in /opt/pal/alum/share/oro/ontologies/oro.owl. Copy this
file to your ~/exchange folder to access it from your host and
inspect it with Protégé.
We can then use this information to ground the user intents in the physical world of the robot.
Add an environment update before each calls to the LLM:
1def on_dialogue_interaction(self,
2 request: DialogueInteraction.Request,
3 response: DialogueInteraction.Response):
4
5 # ...
6
7 self.messages.append({"role": "system", "content": self.environment()})
8 self.messages.append({"role": "user", "content": input})
9
10 # ...
Re-compile and restart your chatbot. You can now ask the robot e.g. what it sees.
The final chatbot code should look like:
1import json
2import time
3from ollama import Client
4
5from knowledge_core.api import KB
6
7from rclpy.lifecycle import Node
8from rclpy.lifecycle import State
9from rclpy.lifecycle import TransitionCallbackReturn
10from rcl_interfaces.msg import ParameterDescriptor
11from rclpy.action import ActionServer, GoalResponse
12from hri_actions_msgs.msg import Intent
13from i18n_msgs.action import SetLocale
14from i18n_msgs.srv import GetLocales
15from diagnostic_msgs.msg import DiagnosticArray, DiagnosticStatus, KeyValue
16from chatbot_msgs.action import Dialogue
17from chatbot_msgs.srv import DialogueInteraction
18from rclpy.action import CancelResponse
19from rclpy.action.server import ServerGoalHandle
20from rclpy.callback_groups import ReentrantCallbackGroup
21
22from pydantic import BaseModel
23from typing import Literal
24from hri_actions_msgs.msg import Intent
25from string import Template
26
27PROMPT = """
28You are a friendly robot called $robot_name. You try to help the user to the best of your abilities.
29You are always helpful, and ask further questions if the desires of the user are unclear.
30Your answers are always polite yet concise and to-the-point.
31
32Your aim is to extract the user goal.
33
34Your response must be a JSON object with the following fields (both are optional):
35- verbal_ack: a string acknowledging the user request (like 'Sure', 'I'm on it'...)
36- user_intent: the user overall goal (intent), with the following fields:
37 - type: the type of intent to perform (e.g. "__intent_say__", "__intent_greet__", "__intent_start_activity__", etc.)
38 - any thematic role required by the intent. For instance: `object` to
39 relate the intent to the object to interact with (e.g. "lamp",
40 "door", etc.)
41
42Importantly, `verbal_ack` is meant to be a *short* acknowledgement sentence,
43unconditionally uttered by the robot, indicating that you have understood the request -- or that we need more information.
44For more complex verbal actions, return a `__intent_say__` instead.
45
46However, for answers to general questions that do not require any action
47(eg: 'what is your name?'), the 'user_intent' field can be omitted, and the
48'verbal_ack' field should contain the answer.
49
50The user_id of the person you are talking to is $user_id. Always use this ID when referring to the person in your responses.
51
52Examples
53- if the user says 'Hello robot', you could respond:
54{
55 "user_intent": {"type": "__intent_greet__", "recipient": "$user_id"}
56}
57
58- if the user says 'What is your name?', you could respond:
59{
60 "verbal_ack":"My name is $robot_name. What is your name?"
61}
62
63- if the user say 'take a fruit', you could respond (assuming a object 'apple1' of type 'Apple' is visible):
64{
65 "user_intent": {
66 "type":"__intent_grab_object__",
67 "object":"apple1",
68 },
69 "verbal_ack": "Sure"
70}
71
72- if the user say 'take a fruit', but you do not know about any fruit. You could respond:
73{
74 "verbal_ack": "I haven't seen any fruits around. Do you want me to check in the kitchen?"
75}
76
77- the user says: 'clean the table'. You could return:
78{
79 "user_intent": {
80 "type":"__intent_start_activity__",
81 "object": "cleaning_table"
82 },
83 "verbal_ack": "Sure, I'll get started"
84}
85
86If you are not sure about the intention of the user, return an empty user_intent and ask for confirmation with the verbal_ack field.
87"""
88
89
90# Define the data models for the chatbot response and the user intent
91class IntentModel(BaseModel):
92 type: Literal[Intent.BRING_OBJECT,
93 Intent.GRAB_OBJECT,
94 Intent.PLACE_OBJECT,
95 Intent.GUIDE,
96 Intent.MOVE_TO,
97 Intent.SAY,
98 Intent.GREET,
99 Intent.START_ACTIVITY,
100 ]
101 object: str | None
102 recipient: str | None
103 input: str | None
104 goal: str | None
105
106
107class ChatbotResponse(BaseModel):
108 verbal_ack: str | None
109 user_intent: IntentModel | None
110##################################################
111
112
113class BasicChatbot(Node):
114
115 def __init__(self) -> None:
116 super().__init__('intent_extractor_chatbot')
117
118 # Declare ROS parameters. Should mimick the one listed in config/00-defaults.yaml
119 self.declare_parameter(
120 'my_parameter', "my_default_value.",
121 ParameterDescriptor(
122 description='Important parameter for my chatbot')
123 )
124
125 self.get_logger().info("Initialising...")
126
127 self._dialogue_start_action = None
128 self._dialogue_interaction_srv = None
129 self._get_supported_locales_server = None
130 self._set_default_locale_server = None
131
132 self._timer = None
133 self._diag_pub = None
134 self._diag_timer = None
135
136 self.kb = KB()
137
138 self._nb_requests = 0
139 self._dialogue_id = None
140 self._dialogue_result = None
141
142 self._ollama_client = Client()
143 # if ollama does not run on the local host, you can specify the host and
144 # port. For instance:
145 # self._ollama_client = Client("x.x.x.x:11434")
146
147 self.messages = [
148 {"role": "system",
149 "content": Template(PROMPT).safe_substitute(robot_name="Robbie", user_id="user1")
150 }]
151
152 self.get_logger().info('Chatbot chatbot started, but not yet configured.')
153
154 def environment(self) -> str:
155 environment_description = ""
156
157 seen_objects = self.kb["myself sees ?obj"]
158 for obj in [item["obj"] for item in seen_objects]:
159 details = self.kb.details(obj)
160 label = details["label"]["default"]
161 classes = details["attributes"][0]["values"]
162 class_name = None
163 if classes:
164 class_name = classes[0]["label"]["default"]
165 environment_description += f"- I see a {class_name} labeled {label}.\n"
166 else:
167 environment_description += f"- I see {label}.\n"
168
169 self.get_logger().info(
170 f"Environment description:\n{environment_description}")
171 return environment_description
172
173 def on_dialog_goal(self, goal: Dialogue.Goal):
174 # Here we check if the goal is valid and the node is able to accept it
175 #
176 # For simplicity, we allow only one dialogue at a time.
177 # You might want to change this to allow multiple dialogues at the same time.
178 #
179 # We also check if the dialogue role is supported by the chatbot.
180 # In this example, we only support only the "__default__" role.
181
182 if self._dialogue_id or goal.role.name != '__default__':
183 return GoalResponse.REJECT
184 return GoalResponse.ACCEPT
185
186 def on_dialog_accept(self, handle: ServerGoalHandle):
187 self._dialogue_id = tuple(handle.goal_id.uuid)
188 self._dialogue_result = None
189 handle.execute()
190
191 def on_dialog_cancel(self, handle: ServerGoalHandle):
192 if self._dialogue_id:
193 return CancelResponse.ACCEPT
194 else:
195 return CancelResponse.REJECT
196
197 def on_dialog_execute(self, handle: ServerGoalHandle):
198 id = tuple(handle.goal_id.uuid)
199 self.get_logger().warn(
200 f"Starting '{handle.request.role.name}' dialogue with id {id}")
201
202 try:
203 while handle.is_active:
204 if handle.is_cancel_requested:
205 handle.canceled()
206 return Dialogue.Result(error_msg='Dialogue cancelled')
207 elif self._dialogue_result:
208 if self._dialogue_result.error_msg:
209 handle.abort()
210 else:
211 handle.succeed()
212 return self._dialogue_result
213 time.sleep(1e-2)
214 return Dialogue.Result(error_msg='Dialogue execution interrupted')
215 finally:
216 self.get_logger().warn(f"Dialogue with id {id} finished")
217 self._dialogue_id = None
218 self._dialogue_result = None
219
220 def on_dialogue_interaction(self,
221 request: DialogueInteraction.Request,
222 response: DialogueInteraction.Response):
223
224 target_dialogue_id = request.dialogue_id
225 user_id = request.user_id
226 input = request.input
227 response_expected = request.response_expected
228 suggested_response = ""
229 intents = []
230
231 self.get_logger().info(
232 f"input from {user_id} to dialogue {target_dialogue_id}: {input}")
233 self._nb_requests += 1
234
235 self.messages.append({"role": "system", "content": self.environment()})
236 self.messages.append({"role": "user", "content": input})
237
238 llm_res = self._ollama_client.chat(
239 messages=self.messages,
240 # you can also try with more powerful models, see https://ollama.com/models
241 model="gemma3:1b",
242 format=ChatbotResponse.model_json_schema()
243 )
244
245 json_res = ChatbotResponse.model_validate_json(llm_res.message.content)
246
247 self.get_logger().info(f"The LLM answered: {json_res}")
248
249 verbal_ack = json_res.verbal_ack
250 if verbal_ack:
251 # if we have a verbal acknowledgement, add it to the dialogue history,
252 # and send it to the user
253 self.messages.append({"role": "assistant", "content": verbal_ack})
254 response.response = verbal_ack
255
256 user_intent = json_res.user_intent
257 if user_intent:
258 response.intents = [Intent(
259 intent=user_intent.type,
260 data=json.dumps(user_intent.model_dump())
261 )]
262
263 return response
264
265 def on_get_supported_locales(self, request, response):
266 response.locales = [] # list of supported locales; empty means any
267 return response
268
269 def on_set_default_locale_goal(self, goal_request):
270 return GoalResponse.ACCEPT
271
272 def on_set_default_locale_exec(self, goal_handle):
273 """Change here the default locale of the chatbot."""
274 result = SetLocale.Result()
275 goal_handle.succeed()
276 return result
277
278 #################################
279 #
280 # Lifecycle transitions callbacks
281 #
282 def on_configure(self, state: State) -> TransitionCallbackReturn:
283
284 # configure and start diagnostics publishing
285 self._nb_requests = 0
286 self._diag_pub = self.create_publisher(
287 DiagnosticArray, '/diagnostics', 1)
288 self._diag_timer = self.create_timer(1., self.publish_diagnostics)
289
290 # start advertising supported locales
291 self._get_supported_locales_server = self.create_service(
292 GetLocales, "~/get_supported_locales", self.on_get_supported_locales)
293
294 self._set_default_locale_server = ActionServer(
295 self, SetLocale, "~/set_default_locale",
296 goal_callback=self.on_set_default_locale_goal,
297 execute_callback=self.on_set_default_locale_exec)
298
299 self.get_logger().info("Chatbot chatbot is configured, but not yet active")
300 return TransitionCallbackReturn.SUCCESS
301
302 def on_activate(self, state: State) -> TransitionCallbackReturn:
303 """
304 Activate the node.
305
306 You usually want to do the following in this state:
307 - Create and start any timers performing periodic tasks
308 - Start processing data, and accepting action goals, if any
309
310 """
311 self._dialogue_start_action = ActionServer(
312 self, Dialogue, '/chatbot/start_dialogue',
313 execute_callback=self.on_dialog_execute,
314 goal_callback=self.on_dialog_goal,
315 handle_accepted_callback=self.on_dialog_accept,
316 cancel_callback=self.on_dialog_cancel,
317 callback_group=ReentrantCallbackGroup())
318
319 self._dialogue_interaction_srv = self.create_service(
320 DialogueInteraction, '/chatbot/dialogue_interaction', self.on_dialogue_interaction)
321
322 # Define a timer that fires every second to call the run function
323 timer_period = 1 # in sec
324 self._timer = self.create_timer(timer_period, self.run)
325
326 self.get_logger().info("Chatbot chatbot is active and running")
327 return super().on_activate(state)
328
329 def on_deactivate(self, state: State) -> TransitionCallbackReturn:
330 """Stop the timer to stop calling the `run` function (main task of your application)."""
331 self.get_logger().info("Stopping chatbot...")
332
333 self.destroy_timer(self._timer)
334 self._dialogue_start_action.destroy()
335 self.destroy_service(self._dialogue_interaction_srv)
336
337 self.get_logger().info("Chatbot chatbot is stopped (inactive)")
338 return super().on_deactivate(state)
339
340 def on_shutdown(self, state: State) -> TransitionCallbackReturn:
341 """
342 Shutdown the node, after a shutting-down transition is requested.
343
344 :return: The state machine either invokes a transition to the
345 "finalized" state or stays in the current state depending on the
346 return value.
347 TransitionCallbackReturn.SUCCESS transitions to "finalized".
348 TransitionCallbackReturn.FAILURE remains in current state.
349 TransitionCallbackReturn.ERROR or any uncaught exceptions to
350 "errorprocessing"
351 """
352 self.get_logger().info('Shutting down chatbot node.')
353 self.destroy_timer(self._diag_timer)
354 self.destroy_publisher(self._diag_pub)
355
356 self.destroy_service(self._get_supported_locales_server)
357 self._set_default_locale_server.destroy()
358
359 self.get_logger().info("Chatbot chatbot finalized.")
360 return TransitionCallbackReturn.SUCCESS
361
362 #################################
363
364 def publish_diagnostics(self):
365
366 arr = DiagnosticArray()
367 msg = DiagnosticStatus(
368 level=DiagnosticStatus.OK,
369 name="/intent_extractor_chatbot",
370 message="chatbot chatbot is running",
371 values=[
372 KeyValue(key="Module name", value="chatbot"),
373 KeyValue(key="Current lifecycle state",
374 value=self._state_machine.current_state[1]),
375 KeyValue(key="# requests since start",
376 value=str(self._nb_requests)),
377 ],
378 )
379
380 arr.header.stamp = self.get_clock().now().to_msg()
381 arr.status = [msg]
382 self._diag_pub.publish(arr)
383
384 def run(self) -> None:
385 """
386 Background task of the chatbot.
387
388 For now, we do not need to do anything here, as the chatbot is
389 event-driven, and the `on_user_input` callback is called when a new
390 user input is received.
391 """
392 pass
Next steps¶

Interaction simulator architecture¶
We have completed a simple social robot architecture, with a mission controller that can react to user intents, and a chatbot that can extract intents from user.
You can now:
Extend the mission controller: add more intents, more complex behaviours, etc;
Structure your application: split your mission controller into tasks and skills, and orchestrate them: 📝 Developing robot apps;
Integrate navigation and manipulation, using the corresponding navigation skills and manipulation skills
Finally, deploy your application on your robot: Deploying ROS 2 packages on your robot.
See also¶
📝 Developing robot apps: learn more about the PAL application model
Intents: learn more about the intent messages
PAL Interaction simulator: learn more about the interaction simulator
💡 Knowledge and reasoning: learn more about the knowledge base and reasoning
return to the Tutorials main page