Simulation¶
3D simulation with Gazebo¶
Introduction to Gazebo world environments¶
PAL’s robots can be simulated with the Gazebo simulator, that offers a realistic 3D environment for simulating and testing our robots. It is integrated with ROS 2 providing features like accurate physics simulation, sensors emulation and customizable environments.
Several different world environments are provided with PAL’s robots:
Empty world is loaded as default when the simulation is launched. The robot spawns in an empty world with no objects, as shown in Figure: Empty world simulated in Gazebo. In order to launch the simulation, the following instruction needs to be executed in a terminal:
source /opt/pal/${PAL_DISTRO}/setup.bash ros2 launch robot_name_gazebo robot_name_gazebo.launch.py
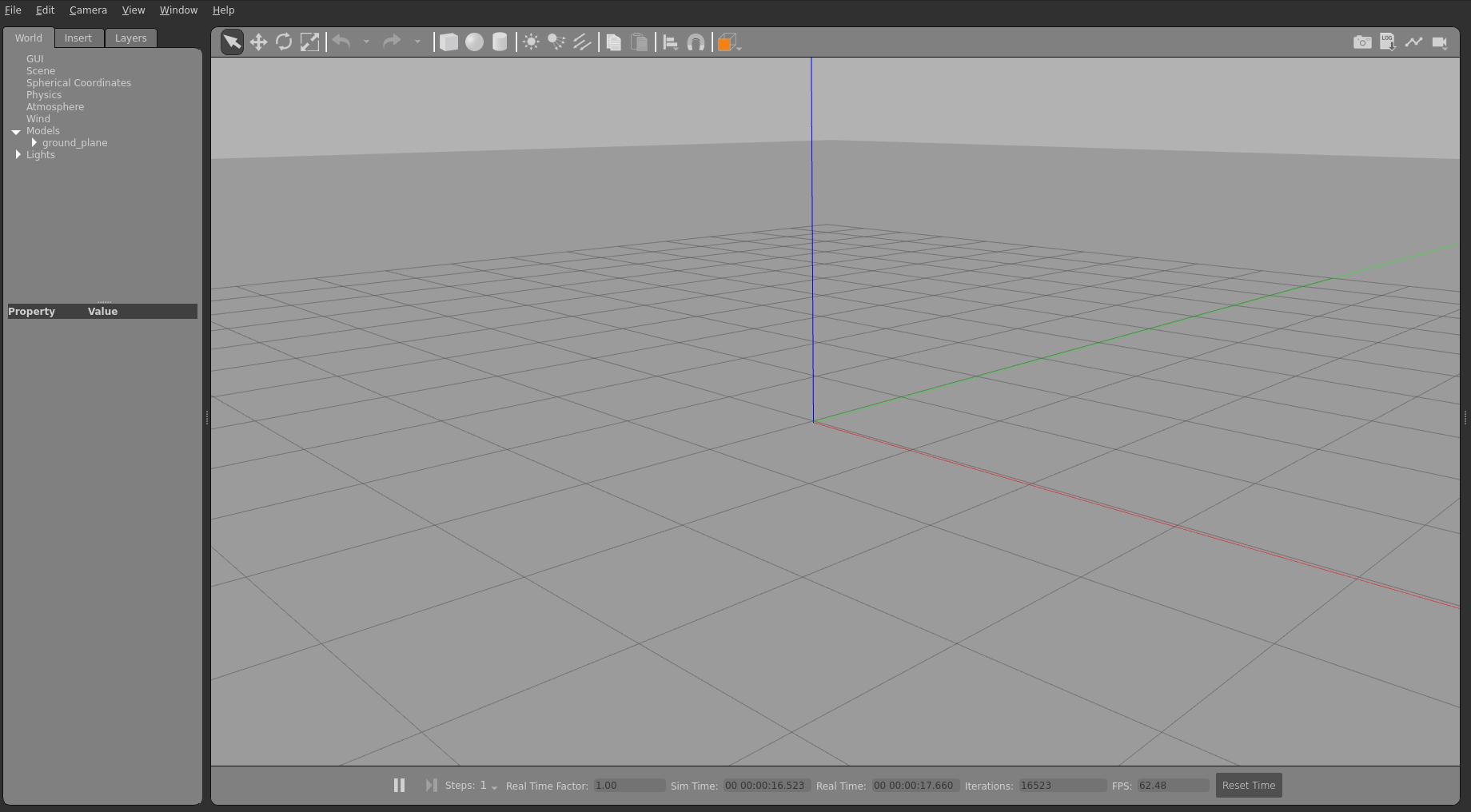
Figure: Empty world simulated in Gazebo¶
Office world is a simple office world as shown in Figure: Small office world simulated in Gazebo can be launched with the following instruction:
source /opt/pal/${PAL_DISTRO}/setup.bash ros2 launch robot_name_gazebo robot_name_gazebo.launch.py world_name:=small_office
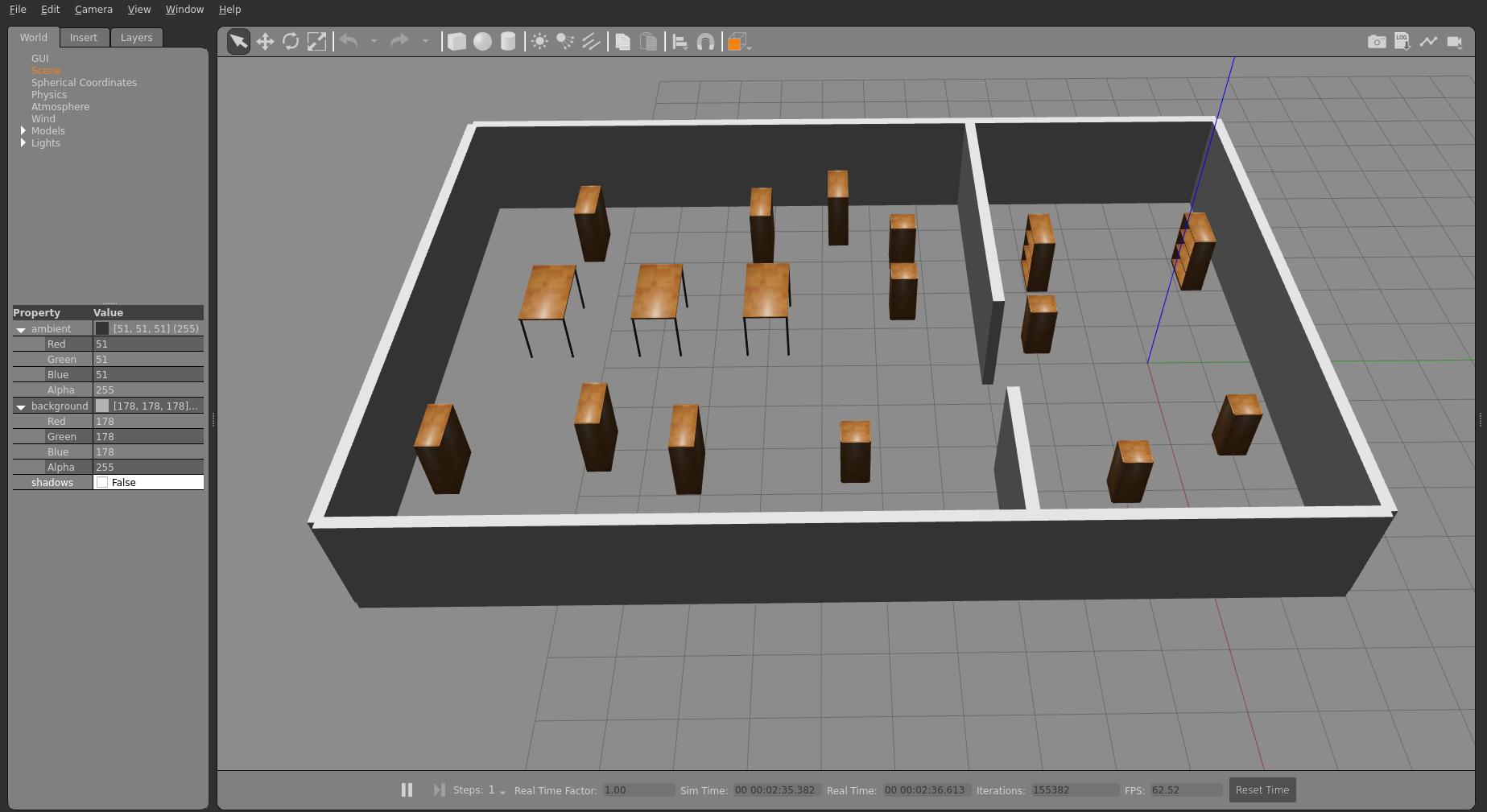
Figure: Small office world simulated in Gazebo¶
PAL Gazebo worlds custom worlds are created by PAL Robotics and are also available in the
humbledistro or can be found at the following link: https://github.com/pal-robotics/pal_gazebo_worlds
PAL robots simulation¶
To start TIAGo Pro using the Gazebo simulation, start your PAL developer Docker image and run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch tiago_pro_gazebo tiago_pro_gazebo.launch.py

Figure: TIAGo Pro robot simulated in Gazebo¶
Work in progress
To start TIAGo using the Gazebo simulation, start your PAL developer Docker image and run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch tiago_gazebo tiago_gazebo.launch.py
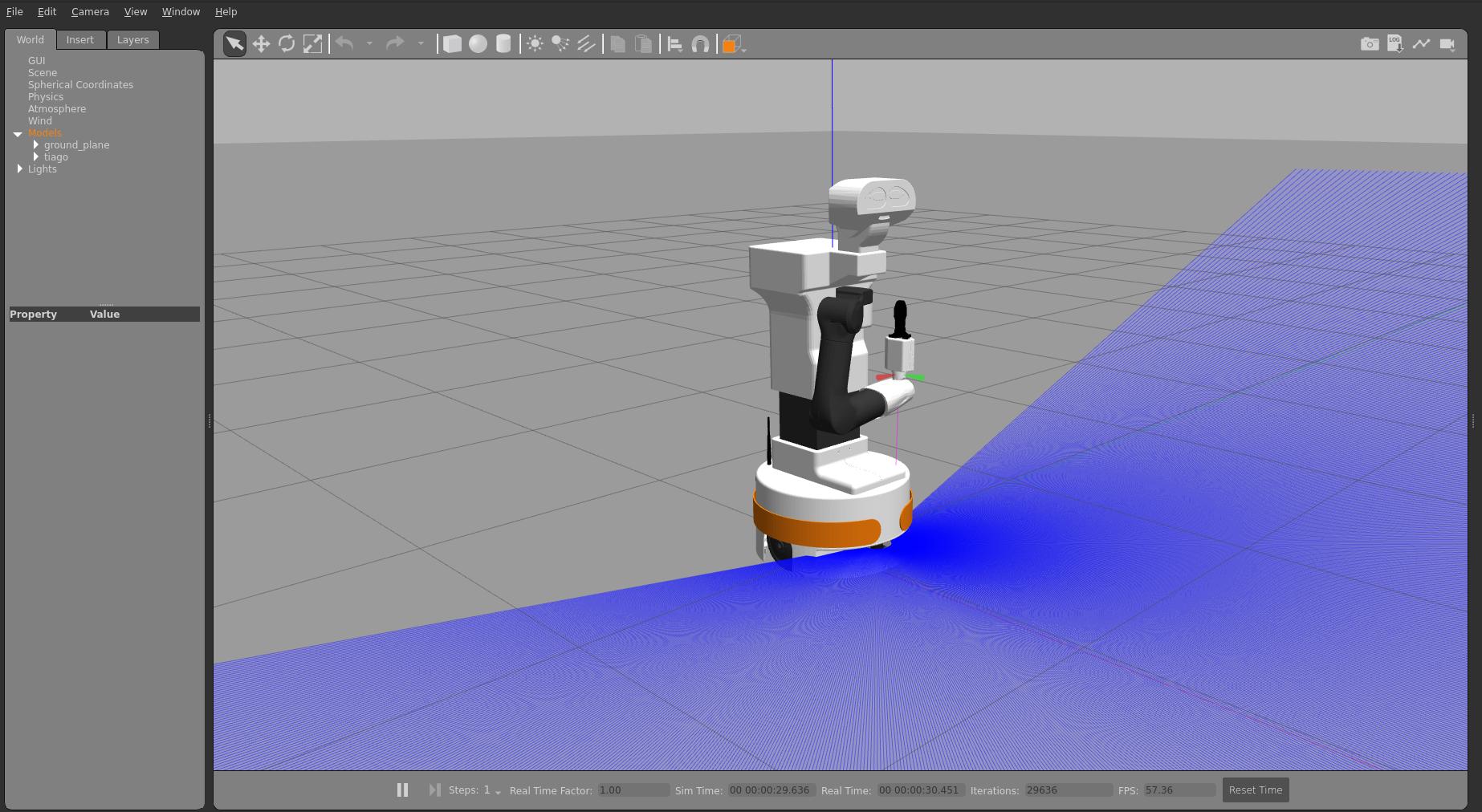
Figure: TIAGo robot simulated in Gazebo¶
To start TIAGo++ using the Gazebo simulation, start your PAL developer Docker image and run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch tiago_dual_gazebo tiago_dual_gazebo.launch.py
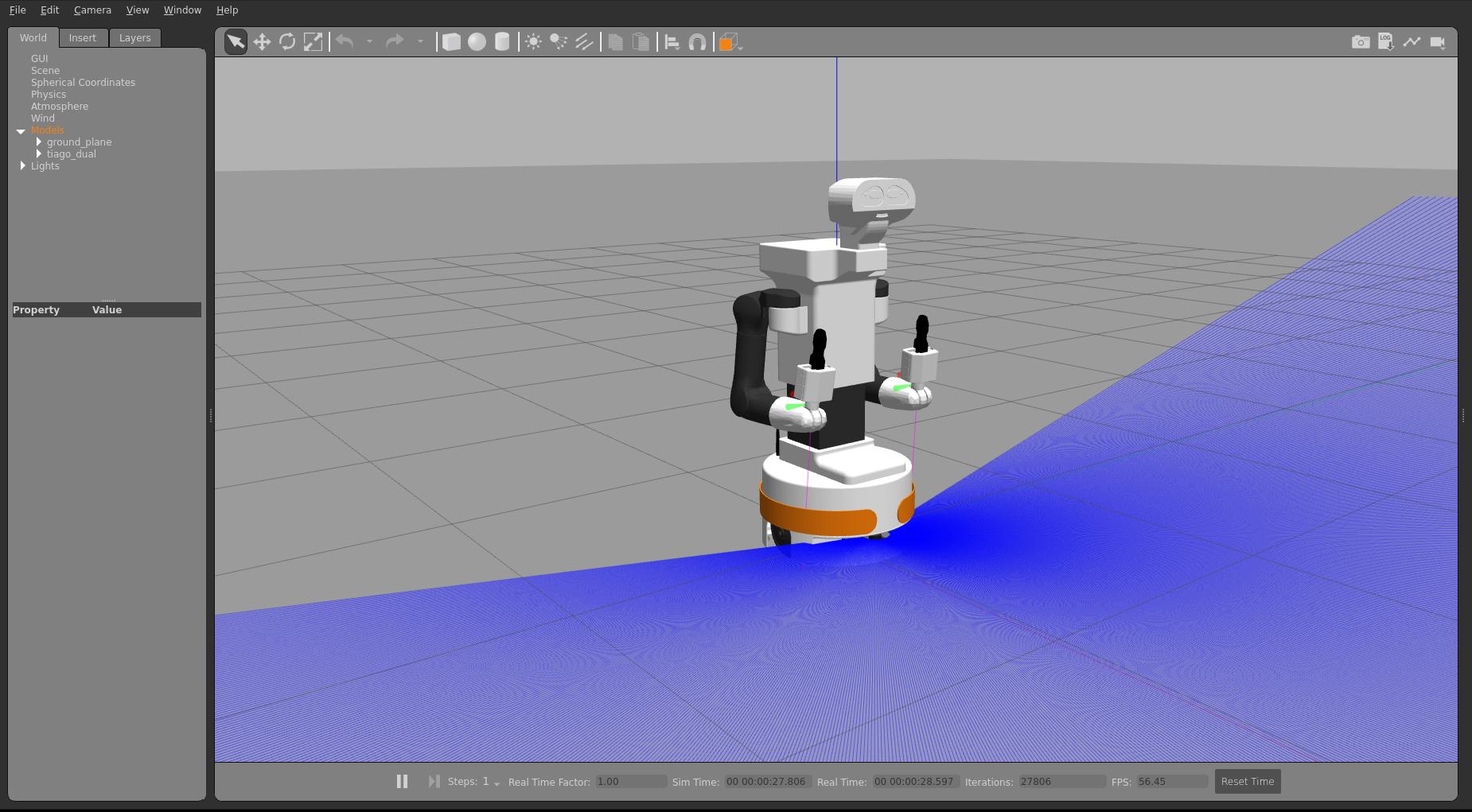
Figure: TIAGo++ robot simulated in Gazebo¶
To start ARI using the Gazebo simulation, start your PAL developer Docker image and run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch ari_gazebo ari_gazebo.launch.py
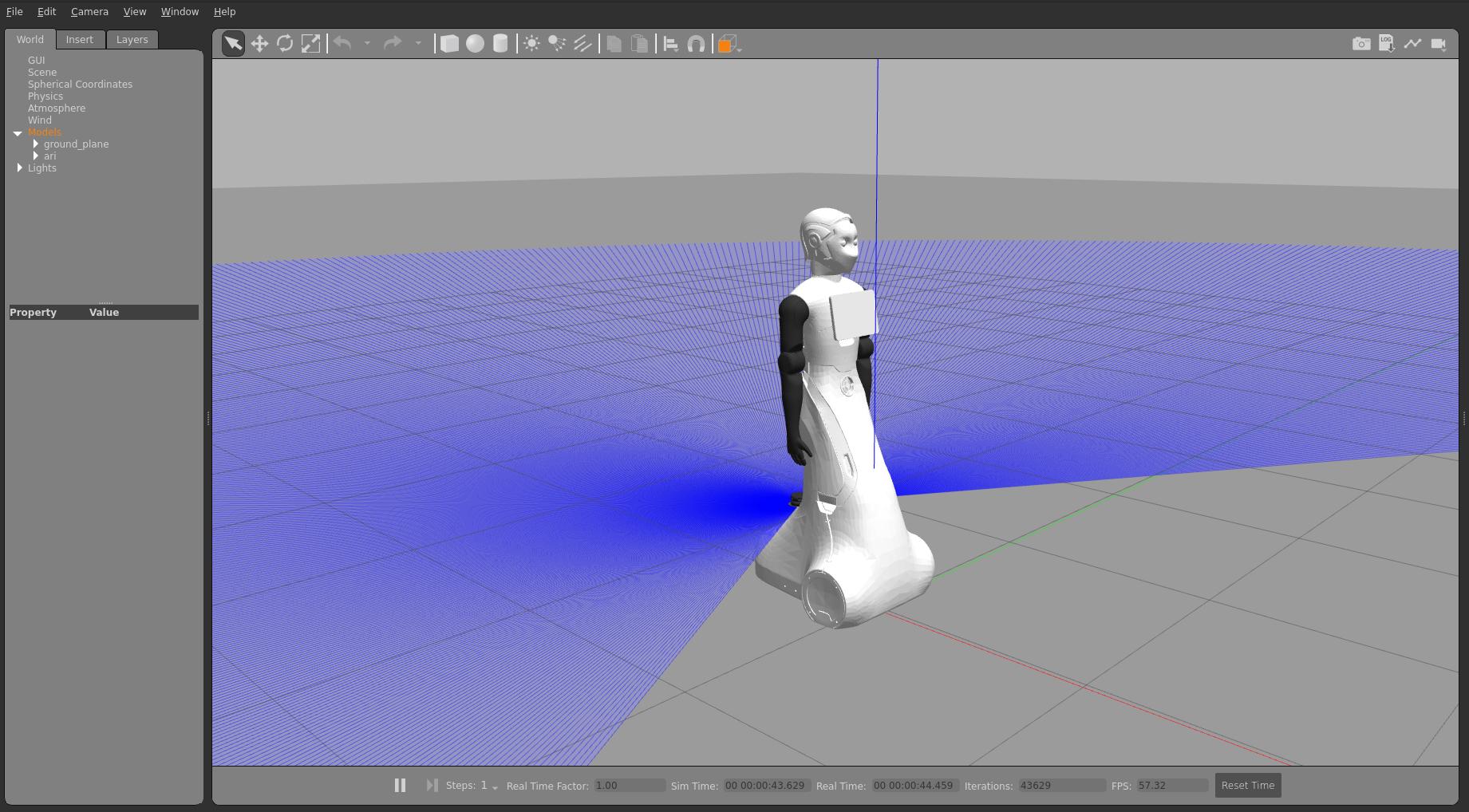
Figure: ARI robot simulated in Gazebo¶
Work in progress Check TALOS instructions to install the simulator here: http://wiki.ros.org/Robots/TALOS/Tutorials/Installation/Simulation
To start TRIAGo using the Gazebo simulation, start your PAL developer Docker image and run the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch triago_gazebo triago_gazebo.launch.py
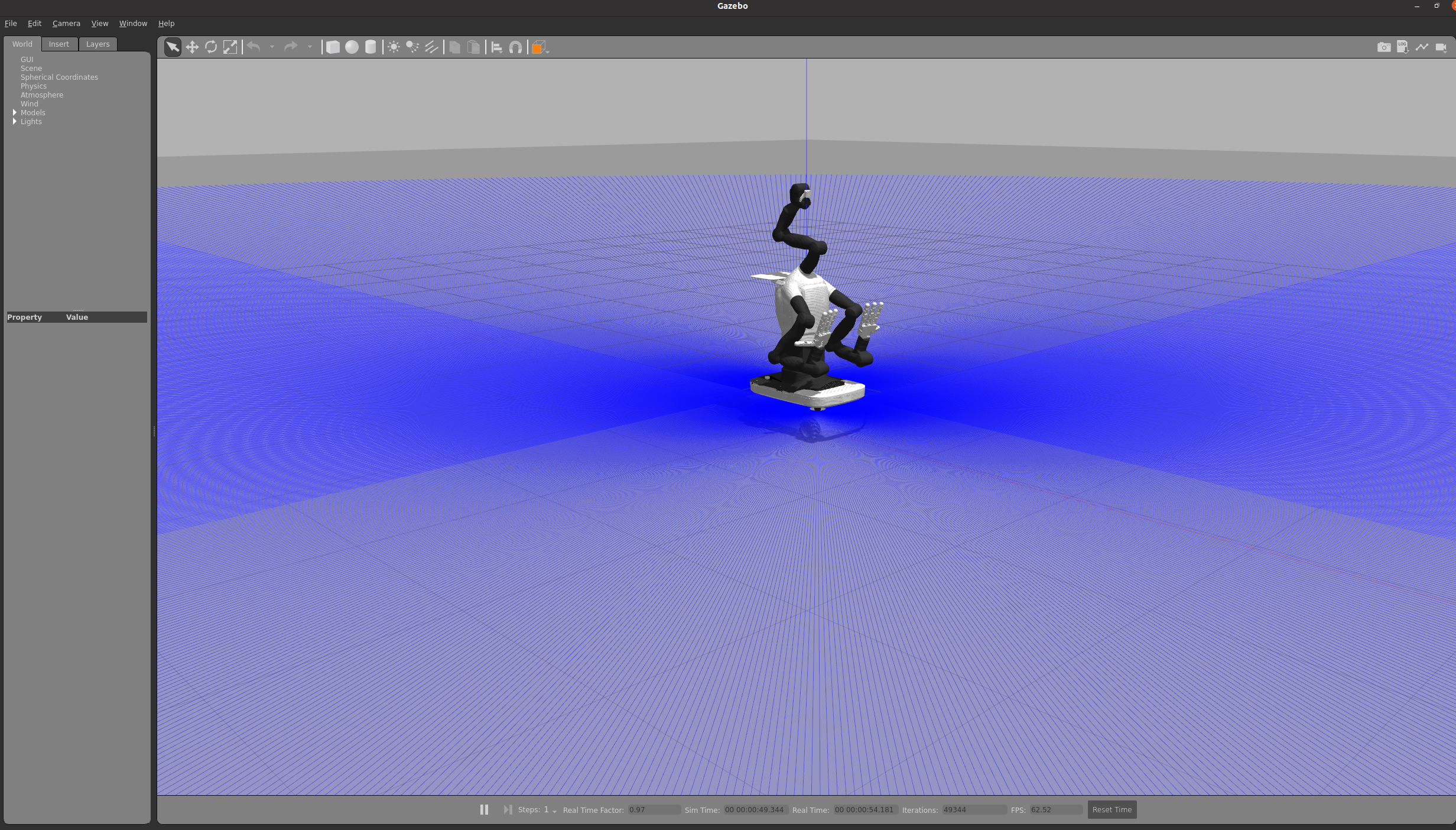
Figure: TRIAGo robot simulated in Gazebo¶
Autonomous Navigation simulation¶
To start the 🧭 Navigation functionalities along with the Gazebo simulation, the following command can be used:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch <robot>_gazebo <robot>_gazebo.launch.py navigation:=True
Attention
Make sure to replace the <robot> placeholder with the name of your robot (e.g. tiago, omni_base,
tiago_pro, etc.).
This starts the Autonomos Navigation along with the 📍 Localization and Rviz to interact with the robot. While in localization mode, the robot will use a map of the environment to localize itself and navigate autonomously. The pal_maps package offers several maps corresponding to the world environment loaded in Gazebo.
For example, to Navigate and Localize in the small_office world, it is enough to use the command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch <robot>_gazebo <robot>_gazebo.launch.py navigation:=True world_name:=small_office
And then change the current map with the command
ros2 service call /map_server/load_map nav2_msgs/srv/LoadMap "map_url: '<PAL_MAPS_DIR>/maps/small/office/map.yaml'"
Attention
Make sure to replace the <PAL_MAPS_DIR> placeholder with the full directory where you cloned ot installed the
pal_maps package.
And the Localization will use the small_office map.

Otherwise, if you want to start the Autonomous Navigation with the 🗺️ Mapping to create a new map of a simulated environment, you can use the following command:
source /opt/pal/${PAL_DISTRO}/setup.bash
ros2 launch <robot>_gazebo <robot>_gazebo.launch.py navigation:=True slam:=True
Interaction simulation with PAL’s Interaction Simulator¶
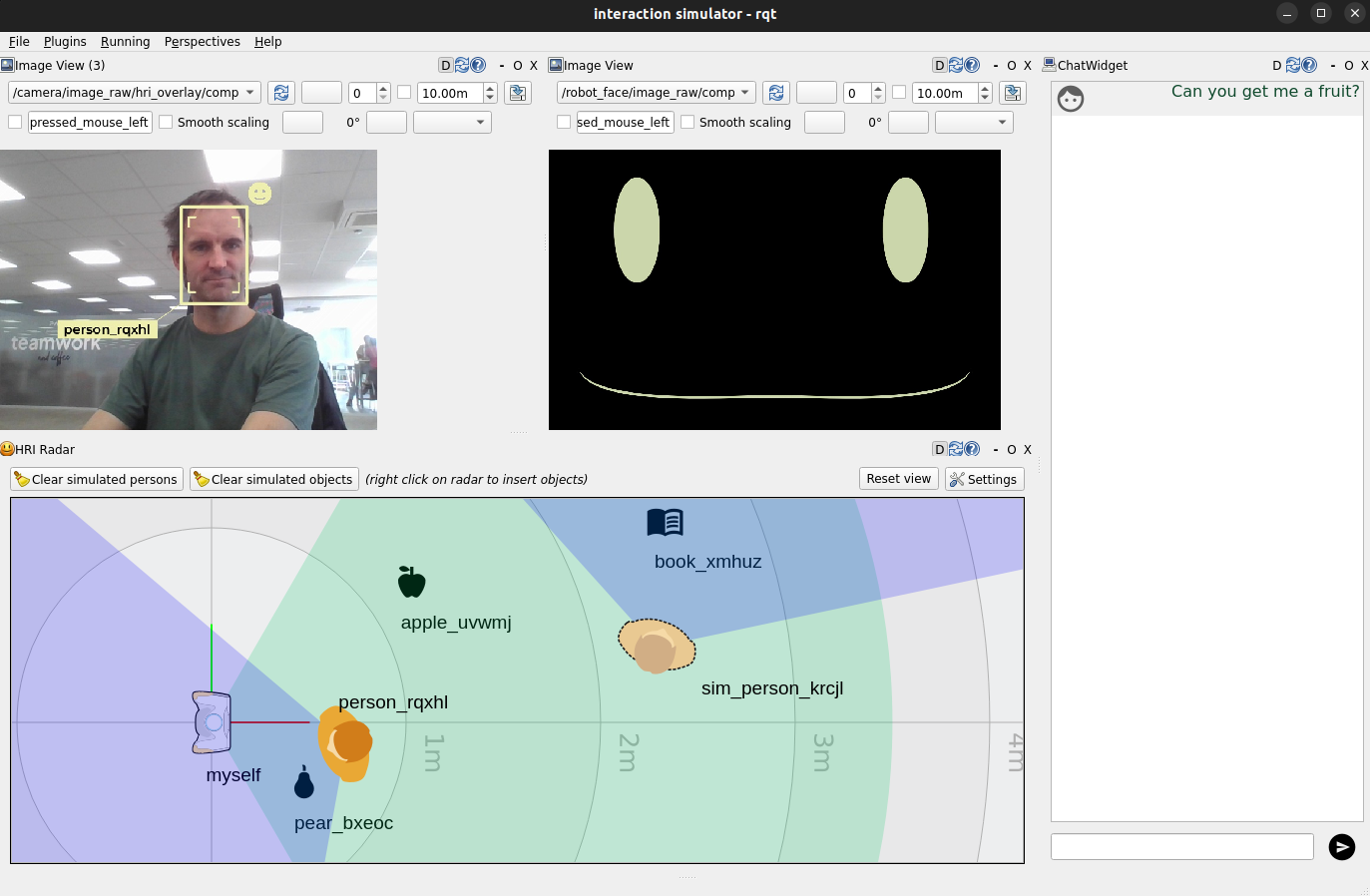
See PAL Interaction simulator for more information.