End effectors control and motions¶
This section describes the different control methods for moving various end effectors, including Hey5, Pal gripper, and the Robotiq 2f-85 and 2f-140 grippers.
To get more information about the end effectors themselves, you can take a look at End-effectors page.
End effectors motions with rqt GUI¶
The joints of the end effectors can be individually moved using a GUI implemented on the ROS’s RQt framework.
If you’re running this example with the real robot, i.e., not in simulation, first follow the instructions in this section to be able to connect to the robot.
Once you make sure you are connected to the robot, the GUI is launched as follows:
ros2 run rqt_joint_trajectory_controller rqt_joint_trajectory_controller
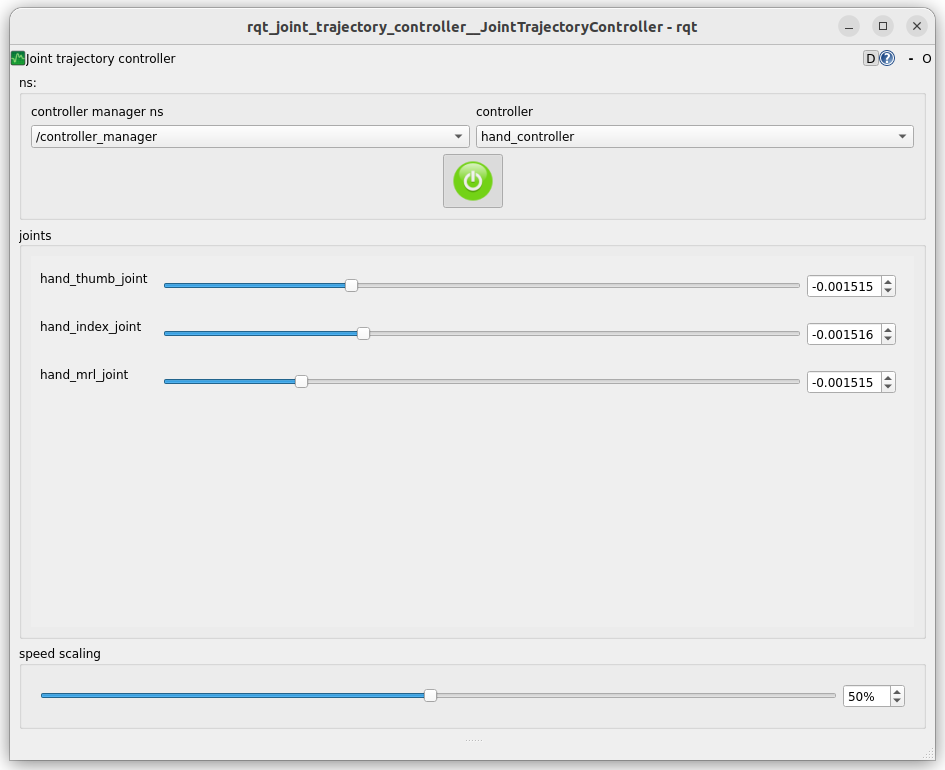
The GUI is shown in figure below. Note that other groups of joints, i.e. head, torso, hand and gripper can also be moved using this GUI.
The GUI is shown in figure below. Note that other groups of joints, i.e. head, torso, hand and
gripper can also be moved using this GUI.
In order to move the hand joints, select /controller_manager in the combo box on the left and
the hand_controller on the right. Sliders for the three actuated joints of the hand will show
up.
The GUI is shown in figure below. Note that other groups of joints, i.e. head, torso, hand and
gripper can also be moved using this GUI.
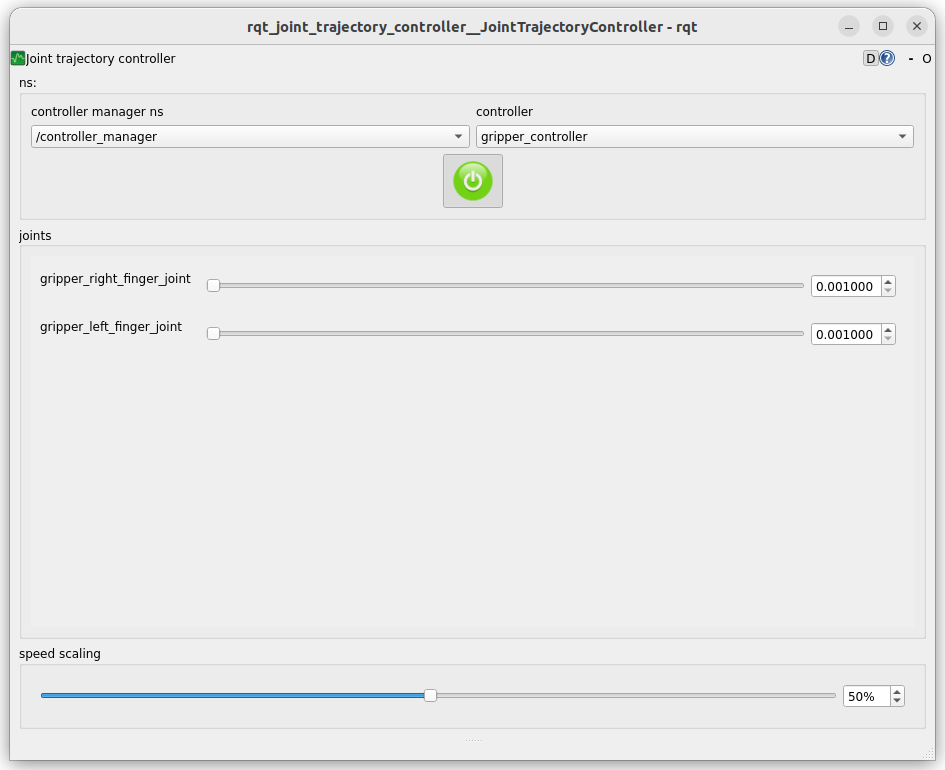
In order to move the hand joints, select /controller_manager in the combo box on the left and
the gripper_controller on the right. Sliders for the two finger joints of the gripper will show
up.
The GUI is shown in figure below. Note that other groups of joints, i.e. head, torso, hand and
gripper can also be moved using this GUI.
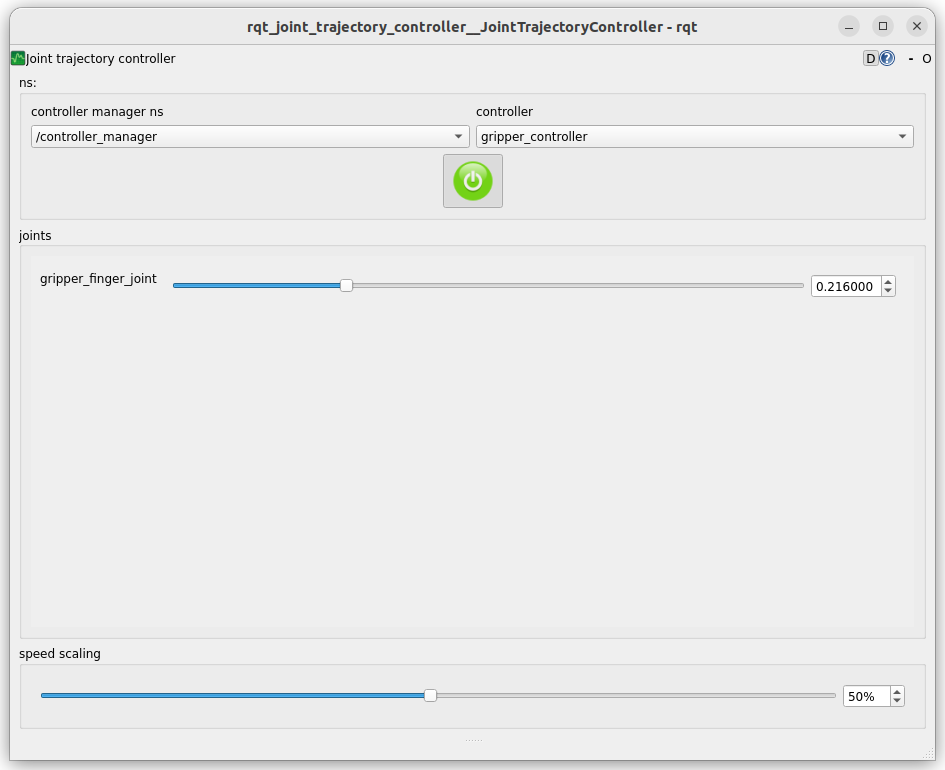
In order to move the hand joints, select /controller_manager in the combo box on the left and
the gripper_controller on the right. Sliders for the joint of the gripper will show
up.
ROS API¶
Refer to the End effectors control ROS API documentation for more details.