Operating system configuration and updates¶
PAL robots run on the Linux Ubuntu operating system, with a patched real-time
kernel. For PAL OS edge, we specifically target Ubuntu 22.04 LTS with RT kernel
5.10.0-rt-amd64.
Hostname¶
The name of your robot’s computer is robot-0c, where robot is eg
tiago or ari, and 0 needs to be replaced by the serial number of
your robot. For the sake of clarity, hereafter we will use robot-0c to
refer to your robot computer name.
In order to connect ot the robot, use ssh as follows:
ssh pal@robot-0c
Users¶
The users and default passwords in the PAL’s robots computers are:
pal: Default password is pal.
ROS 2 and ROS 2 packages¶
ROS 2 is the standard robotics middleware used on all PAL robotic platforms.
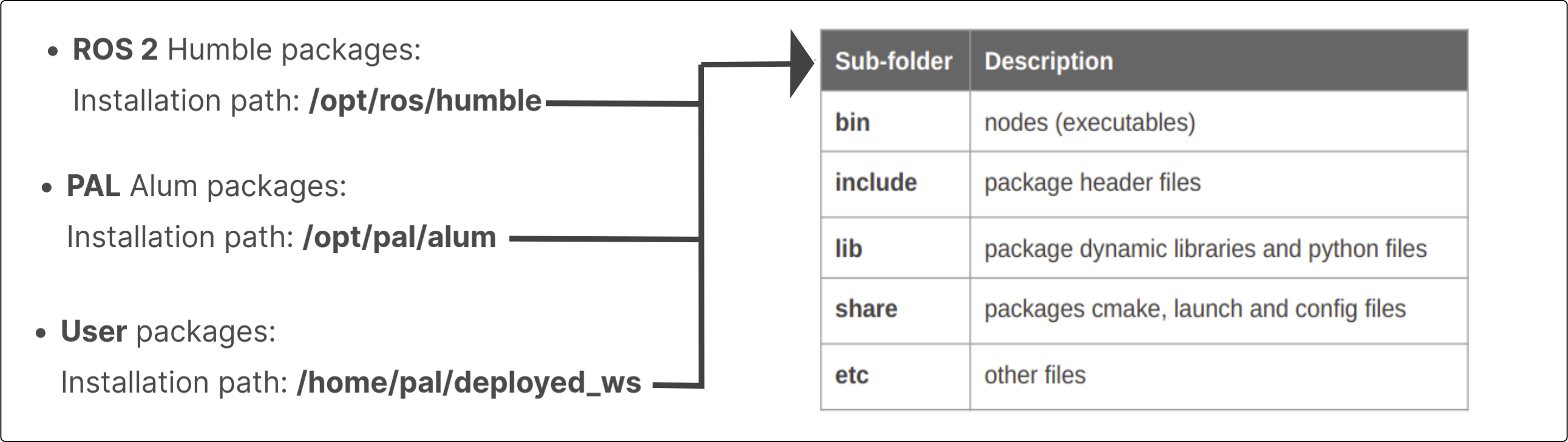
ROS 2 packages on the robots can be categorised into three groups:
packages belonging to the official ROS 2 distribution (ROS 2
humblefor PAL OS edge);packages specifically developed by PAL Robotics, which are included in the company’s own distribution (
alumversion for PAL OS edge);optionally, your own ROS 2 packages.
The three categories of packages are installed in different locations of the
SSD, as shown in figure below. The ROS 2 humble packages are installed in
a read-only partition as explained above.
Note that even if these software packages can be modified or
removed (at the customer’s own risks), a better strategy is to overlay them
using the deployment tool presented in Deploying ROS 2 packages on your robot. The same deployment
tool can be used to install ROS packages in the user space. With this method,
user packages are installed in the /home/pal/deployed_ws/ directory.
Firmware update¶
Important
You should not perform a firmware update without being instructed by the PAL support to do so. Firmware updates can easily brick your robot, requiring it to be shipped back to PAL for reflashing.
Before running the script, place the arm in a safe position with a support underneath it, as during the installation of the script, the arm can tumble.
Run the update_firmware.sh script, as shown below. The update will take a few
minutes.
pal@robot-0c:~# ros2 run firmware_update_robot update_firmware.sh
Finally, shut it down completely, power off with the electric switch and then power up the robot.