1 TIAGo OMNI Base handbook¶
2 Package contents¶
2.1 Overview¶
This section includes a list of items and accessories that come with TIAGo OMNI Base. Make sure they’re all present:
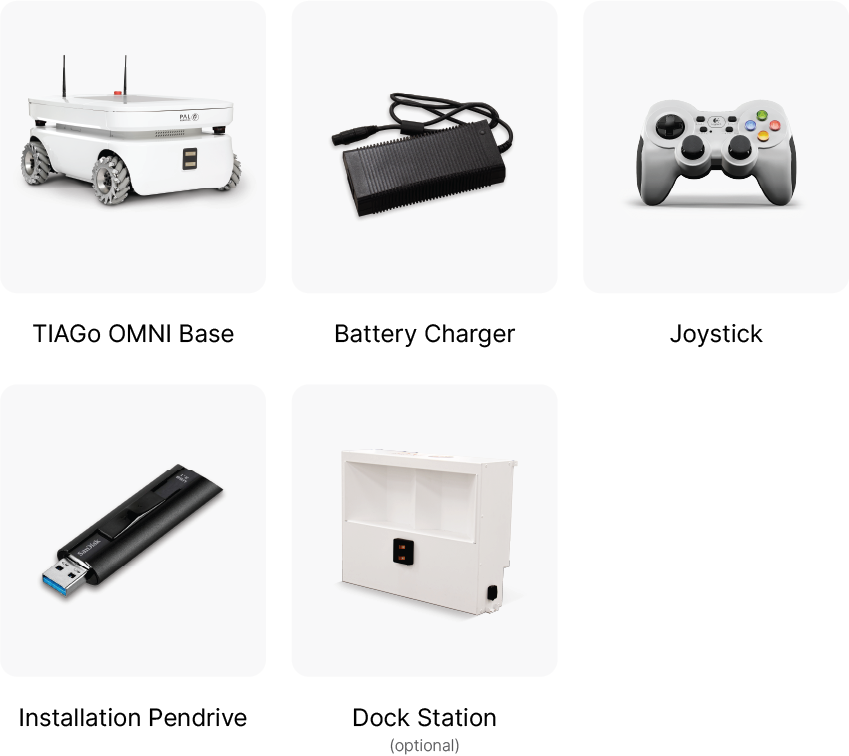
Figure: Components inside transportation box¶
Furthermore, a set of physical keys is provided for authorized personnel to facilitate the switching on and off of the robot.

Figure: Physical keys¶
3 Specifications¶
3.1 Robot overview¶
TIAGo OMNI Base’s main specifications are summarized in the tables below.

Figure: TIAGo OMNI Base¶
Robot’s main specifications:
Height |
31 cm |
Weight |
48 Kg |
Base footprint |
72 * 50 cm |
Drive system |
Omnidirectional |
Max speed |
1 m/s |
Payload |
150 kg |
Battery |
2 x 36 V, 20 Ah |
3.2 Mobile base¶
TIAGo ’s mobile base is provided with a omnidirectional drive mechanism and contains an onboard computer, batteries, power connector, two laser-rangefinder, a user panel, a service panel and two WiFi networks to ensure wireless connectivity. Furthermore, the version of TIAGo with a docking station has a charging plate on the front.
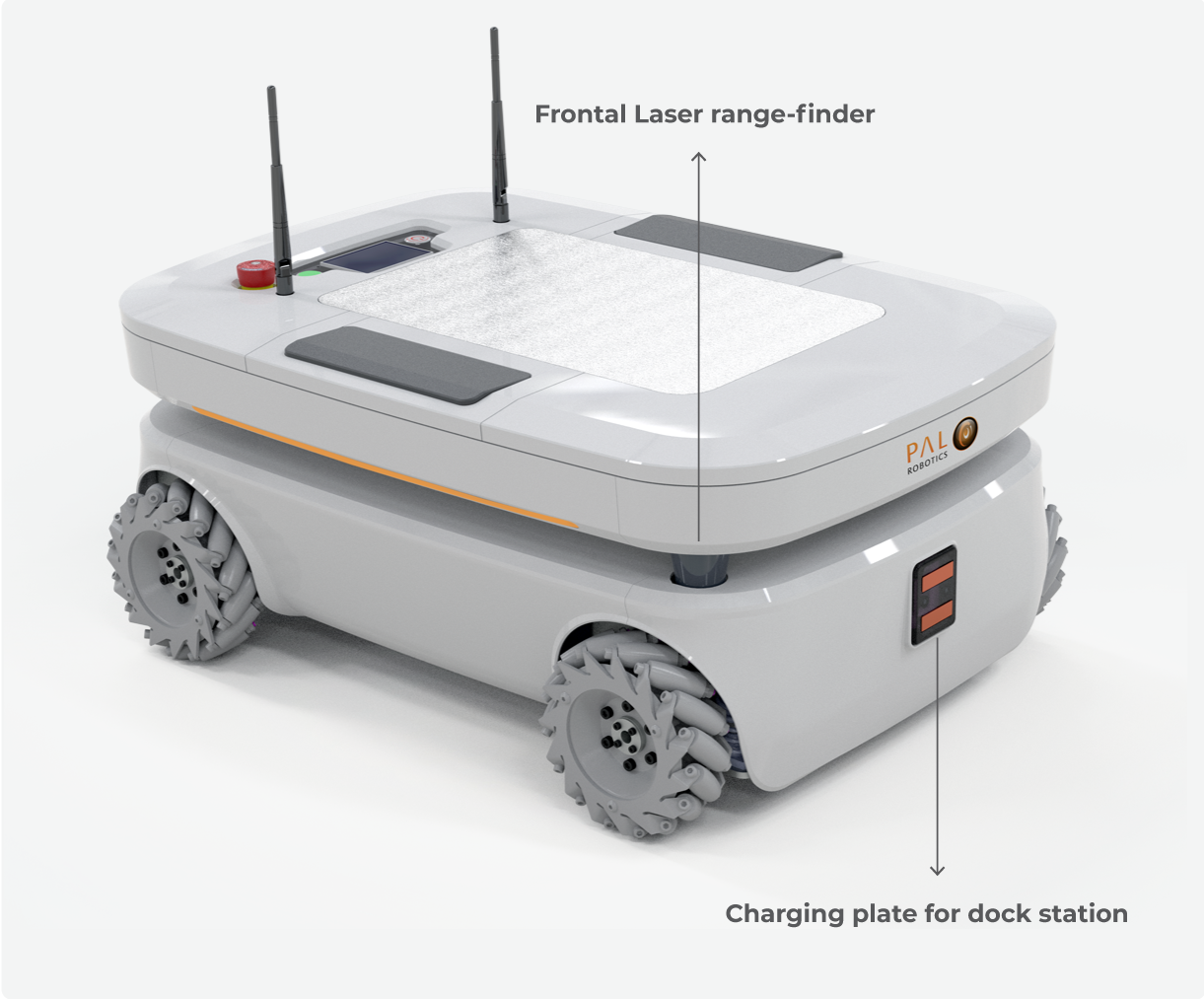
Figure: Mobile base front view¶

Figure: Mobile base rear view¶
3.2.1 Onboard computer¶
The specifications of TIAGo ’s onboard computer depends on the configuration options you have ordered. The different possibilities are shown in table below:
Component |
Description |
|---|---|
CPU |
Intel i5 / i7 |
RAM |
8 / 16 GB |
Hard disk |
250 / 500 GB SSD |
Wi-Fi |
802.11 a/b/g/n/ac |
Bluetooth |
Smart 4.0 Smart Ready |
3.2.2 Battery¶
The specifications of the battery supplied with TIAGo are shown in table below:
Type |
Li-Ion |
|---|---|
V_nominal |
36.0 V |
V_max |
42.0 V |
V_cutoff |
30.0 V |
Nominal capacity |
20 Ah |
Nominal energy |
720 Wh |
Max. continuous discharge current |
20 A |
Pulse discharge current |
60 A |
Max. charging current |
15 A |
Charging method |
CC/CV |
Weight |
7.5 kg |
TIAGo OMNI Base can be equipped with two batteries. In this case, the total Nominal capacity is 1440 Wh.
3.2.3 Power connector¶
TIAGo OMNI Base must only be charged only with the supplied charger. To insert the charger connector, open the lid located on the rear part of the robot, as shown in Figure: Connector entry
Connection Insert charging connector with metal lock facing up and push it, as shown in Figure: Connector entry b , until you hear a ’click’.
Disconnection Once charge is completed, connector can be removed. In order to o remove it, press metal lock and pull the connector firmly, see Figure: Connector entry.

Figure: Connector entry¶
3.2.4 Laser range-finder¶
The specifications of the laser on the front part of the mobile base depend on the configuration options you have ordered. The lasers supported are shown in table:
Manufacturer |
Hokuyo |
|---|---|
Model |
URG-04LX-UG01 |
Range |
0.02 - 5.6 m |
Frequency |
10 Hz |
Field of view |
180 degrees |
Step angle: |
0.36 degrees |
Manufacturer |
SICK |
|---|---|
Model |
TIM561-2050101 |
Range |
0.05 - 10 m |
Frequency |
15 Hz |
Field of view |
180 degrees |
Step angle: |
0.33 degrees |
Manufacturer |
SICK |
|---|---|
Model |
TIM571-2050101 |
Range |
0.05 - 25 m |
Frequency |
15 Hz |
Field of view |
180 degrees |
Step angle: |
0.33 degrees |
3.2.5 IMU¶
The Inertial Measurement Unit is mounted at the center of the mobile base and may be used to monitor inertial forces and attitude. The specifications are presented in the table:
Manufacturer |
InvenSense |
|---|---|
Model |
MPU-6050 |
Gyroscope |
3-axis |
Accelerometer |
3-axis |
3.2.6 User panel¶
The user panel is on the top, rear part of TIAGo OMNI Base. It provides the buttons to power up and shutdown the robot, and a screen to give visual feedback on the robot’s status. All the specific elements of the user panel are shown in the figure below and the description of each element is presented in the table below:
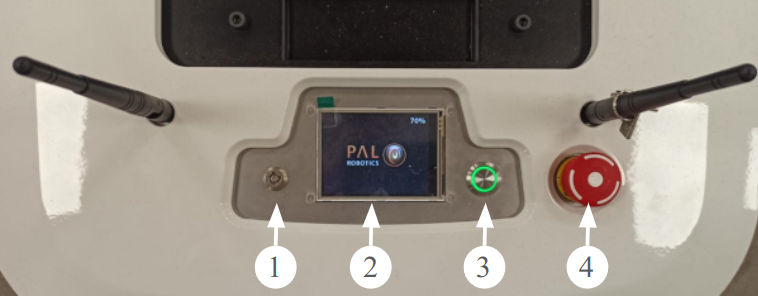
Figure: User Panel¶
Number |
Name / Short description |
|---|---|
1 |
Electric key lock |
2 |
Information display (optional) |
3 |
On / Off button |
4 |
Emergency stop |
Electric key lock This is the main power control switch. When TIAGo OMNI Base is not going to be used for a long period of time, please turn off the power by selecting OFF position as shown in the following figure:
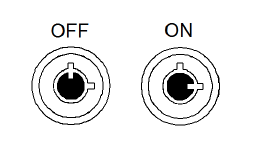
Figure: Electric Key Lock¶
Emergency stop When pushed, motors are stopped and disconnected. The green indicator of the On/Off button will blink fast in order to notify the user of the emergency state.
To start normal behaviour again, a two step validation process must be executed: the emergency button must be released by rotating clockwise, and then the On/Off button must be pressed for one second. The green light indicator of the On/Off button will change to a fixed state.
Information display 320x240 Color TFT display shows the battery level on the top right corner.
On / Off button he standby control button is a pushbutton with a green light that indicates the system’s current status.
Light |
State |
Name / Short description |
|---|---|---|
Off |
Fixed |
Standby |
On |
Fixed |
Running |
On |
Slow-Blink |
System in process of shutdown |
On |
Fast-Blink |
Emergency state |
After main power is connected, i.e. electric switch is ON (Figure: User panel), user must press this button during 1 second in order to start the TIAGo OMNI Base.
To re-set the system in standby mode when the robot is running, press the button again. The green light will blink slowly during shutdown procedure and light-off when standby mode reached.
3.2.7 Panels for the user¶
3.2.7.1 Service panel¶
The frontal white top cover (which is attached with magnets) needs to be removed to access the service panel (see figure Figure: Service panel).

Figure: Service panel¶
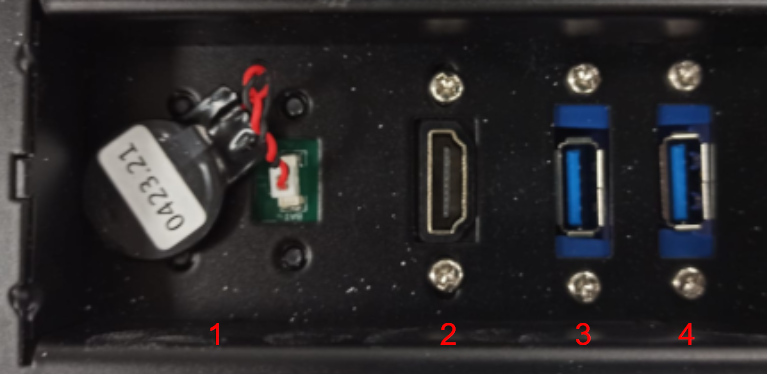
Number |
Name / Short description |
|---|---|
1 |
Computer BIOS battery |
2 |
HDMI port |
3 |
USB 3 |
4 |
USB 3 |
3.2.7.2 Expansion panel¶
In order to access this panel the top plate of the robot must be removed.

Mounting plate must be removed in order to get access to this panel.
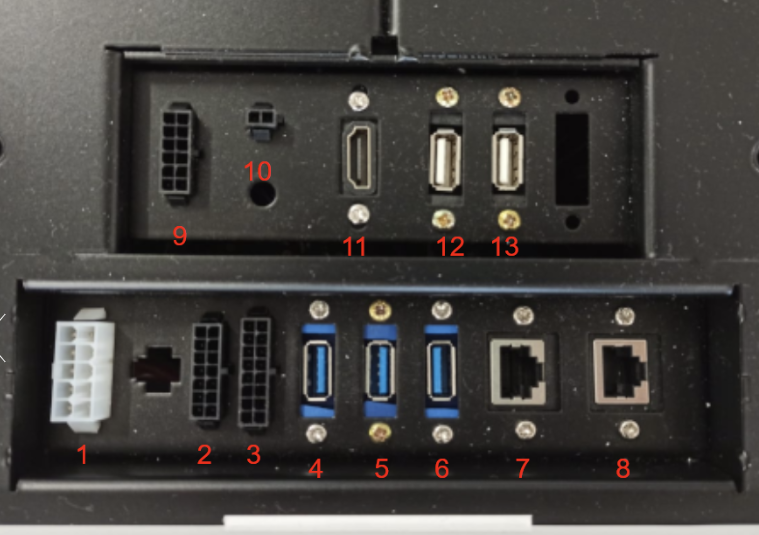
Number |
Name / Short description |
|---|---|
1 |
Power connector |
2 |
Communications Expansion, i.e. CAN (if ordered) |
3 |
GPIOs |
4 |
USB 3 |
5 |
USB 3 |
6 |
USB 3 |
7 |
Ethernet |
8 |
Ethernet |
9 |
Reserved |
10 |
Speaker |
11 |
HDMI |
12 |
USB 2 |
13 |
USB 2 |
Power connector
This expansion connector provides access to the battery and provide up to 360 W. Battery voltage can vary depending on actual State Of Charge in the range of 30V to 42V.
It is recommended to use the all 3 battery output pins in parallel to divide current between them. The maximum current that can be provided through these battery pins is 10 A in total, approximately.
Connector type Molex 39012101, mating part is Molex 39012100.
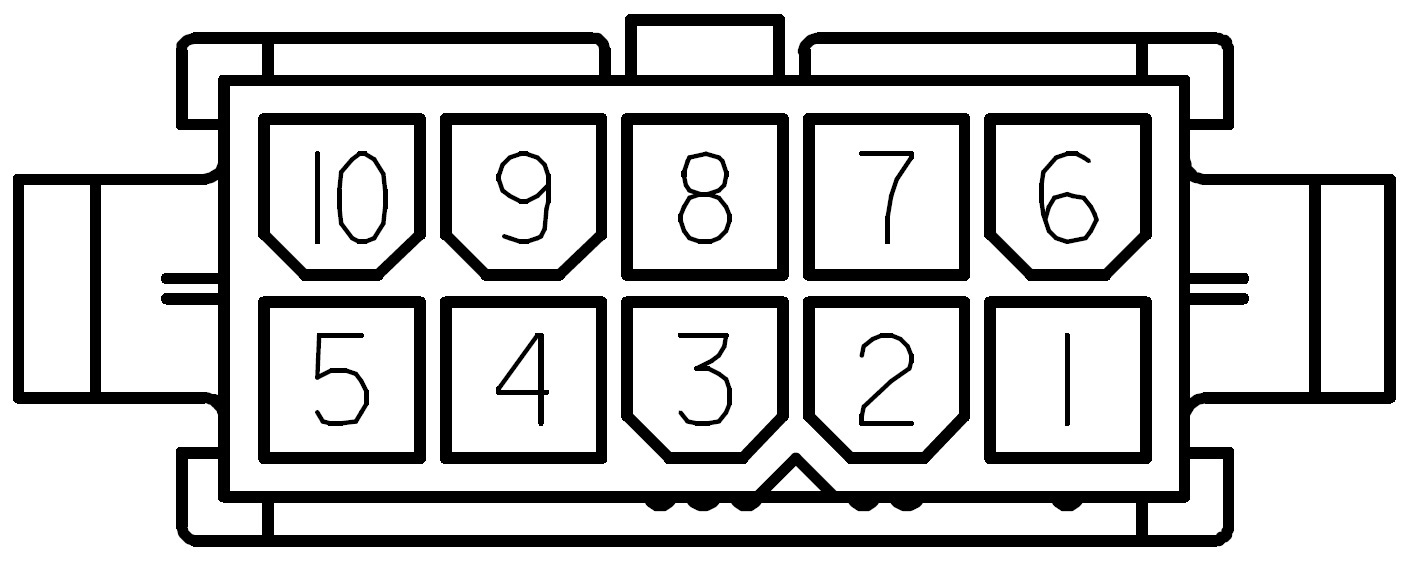
Figure: Power expansion connector pinout¶
Pin |
Name / Short description |
|---|---|
1 |
|
2 |
+12V output (max 4.5A shared with SICK Laser if present) |
3 |
Battery output (max 9A/pin) |
4 |
Battery output (max 9A/pin) |
5 |
Battery output (max 9A/pin) |
6 |
|
7 |
GND of 12V output |
8 |
Battery GND |
9 |
Battery GND |
10 |
Battery GND |
Communications expansion
This expansion connector provides access to internal communication buses of the robot. There are 2 CAN buses for motors and actuators and a propietary bus for sensors. Only the CAN buses are available to the user. CAN bus speed is 1Mbit/s.
Connector type Molex 43020-1400, mating part is Molex 43025-1400.
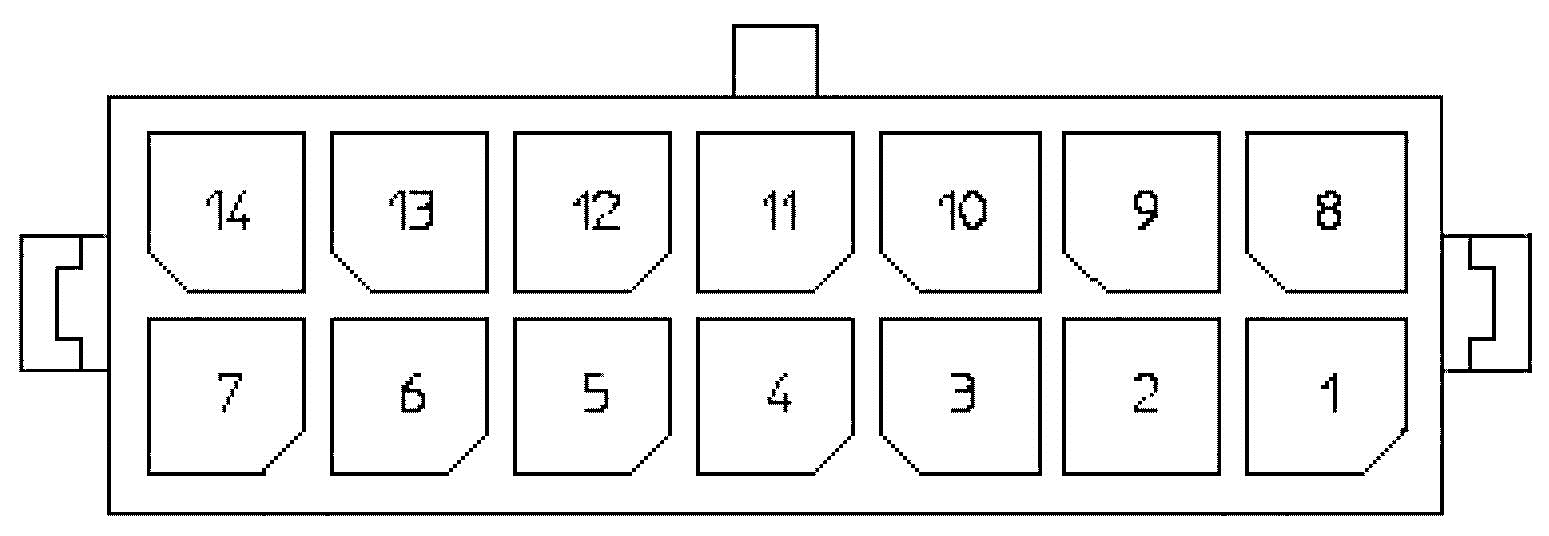
Figure: Communication expansion connector pinout¶
Number |
Name / Short description |
|---|---|
1 |
CANL of LEFT bus |
2 |
Shield of LEFT bus |
3 |
CANH of LEFT bus |
4 |
reserved |
5 |
reserved |
6 |
reserved |
7 |
n.c. |
8 |
CANL of RIGHT bus |
9 |
Shield of RIGHT bus |
10 |
CANH of RIGHT bus |
11 |
n.c. |
12 |
n.c. |
13 |
n.c. |
14 |
n.c. |
GPIOs
This expansion connector provides access to General Purpose Input (GPI) and Output (GPO) pins.
Connector type Molex 43020-1600, mating part is Molex 43025-1600.
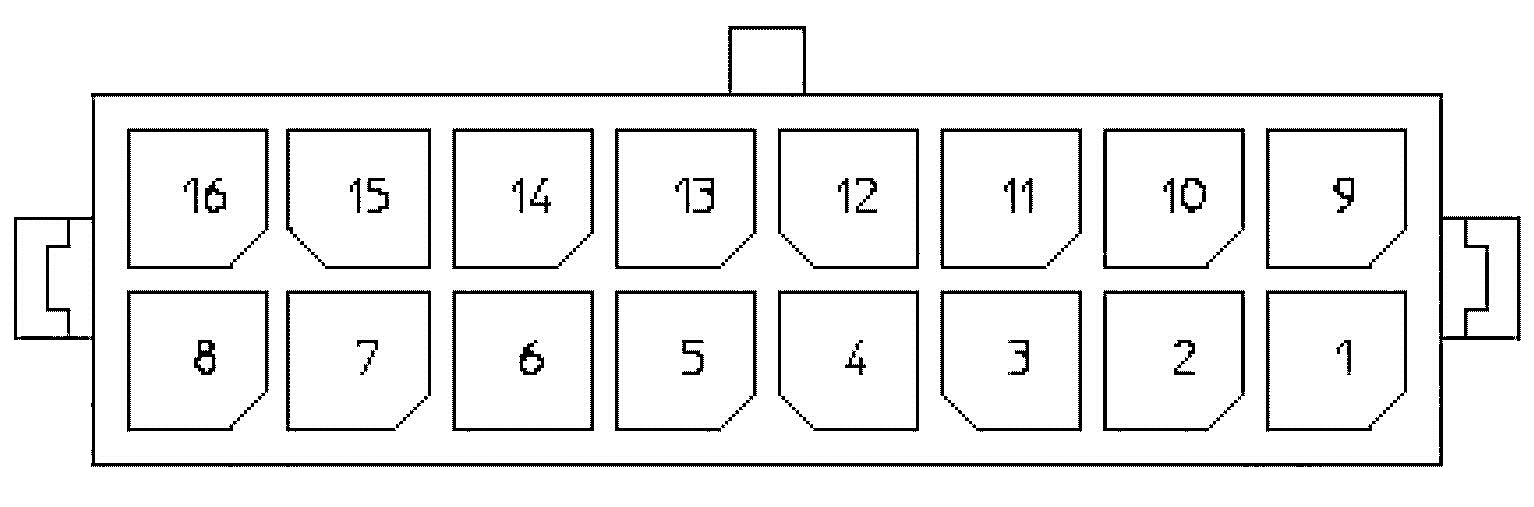
Figure: GPIOs connector pinout¶
Number |
Name / Short description |
|---|---|
1 |
|
2 |
|
3 |
|
4 |
+5V |
5 |
GPO 0 (5V TTL level) |
6 |
GPO 1 (5V TTL level) |
7 |
GPO 2 (5V TTL level) |
8 |
GPO 3 (5V TTL level) |
9 |
|
10 |
|
11 |
|
12 |
GND |
13 |
GPI 0 (5V TTL level) |
14 |
GPI 1 (5V TTL level) |
15 |
GPI 2 (5V TTL level) |
16 |
GPI 3 (5V TTL level) |
General purpose outputs are referenced to pin 12 GND and by default are set to low level. On the other hand, general purpose inputs must be set using pin 4 +5V for high level and pin 12 GND for low level, and have an internal default pull-up.
3.2.8 Connectivity¶
TIAGo is equipped with a dual band Wireless 802.11b/g/n/ac interface, plus bluetooth 4.0 and a WiFi antenna. When the WiFi interface is configured as access point, it has a 802.11g interface.
There are two Gigabit Ethernet ports, ports 2 and 3 in the expansion panel figure, that can be used to connect to the robot’s internal network. For this network, the IP address range 10.68.0.0/24 has been reserved. The IP addresses used in the building network MUST not use this range because it can interfere with the robot’s services.
3.3 Electrical parts and components¶
Neither TIAGo OMNI Base nor any of its electrical components or mechanical parts are connected to external ground. The chassis and all electromechanical components are physically isolated from the ground by the isolation rubber under its feet. Avoid touching any metal parts directly to prevent discharges and damage to TIAGo OMNI Base’s electromechanical parts.
Electrical power supply and connectors
The power source supplied with TIAGo OMNI Base is compliant with the Directive on the restriction of the use of certain hazardous substances in electrical and electronic equipment 2002/95/EC (RoHS) and with the requirements of the applicable EC directives, according to the manufacturer. The power source is connected to the environment ground, whenever the supplied wire is used (Phase-Neutral-Earth).
4 Storage¶
4.1 Overview¶
This section contains information relating to the storage of TIAGo OMNI Base.
4.2 Unboxing TIAGo OMNI Base¶
This section explains how to unbox TIAGo OMNI Base safely. TIAGo OMNI Base is shipped with the flightcase shown in figure:

Figure: TIAGo OMNI Base flightcase¶
The flightcase MUST be always transported flat as shown in picture 7 to ensure the robot’s safety.
The lid of the box is used as a ramp to go up the omnidirectional base (1). The ramp is removed and these 4 foams are put under pressure (2). The foams are pressed with the side cover so that the base is fixed. And the Dock Station is placed (3). The Wi-Fi antennas are folded, and the accessories box is placed (4), The set is covered with the upper foam, matching the hole in the foam with the antennas and the emergency button (5). Place the end lid and center the foam so that everything fits (6). Ready to transport and move (7).
Do not pull on any part of the omni base cover, as it could cause damage to you or the robot.

Figure: Boxing procedure¶
5 Storage cautions¶
Always store TIAGo OMNI Base in a place where it will not be exposed to weather conditions.
The storage temperature range for TIAGo OMNI Base is between 0ºC ∼ +60ºC.
The storage temperature range for the batteries is between +10ºC ∼ +35ºC.
It is recommended to turn completly off (red power button is off) the TIAGo OMNI Base when the storage period exceeds two weeks.
It is recommended to charge the battery to 50% when storing it for more than two weeks.
Avoid the use or presence of water near TIAGo OMNI Base.
Avoid any generation of dust close to TIAGo OMNI Base.
Avoid the use or presence of magnetic devices or electromagneticfields near TIAGo OMNI Base.
6 Introduction to safety¶
6.1 Overview¶
Safety is important when working with TIAGo OMNI Base. This chapter provides an overview of safety issues, general usage guidelines to maintain safety, and some safety-related design features. Before operating the robot, all users must read and understand this chapter!
6.2 Intended applications¶
It is important to clarify the intended usage of the robot prior to any kind of operation.
TIAGo OMNI Base is a robotics research and development platform designed to be operated in a controlled environment, under supervision by trained staff at all times
- The hardware and software of TIAGo OMNI Base enables research and development of activities in the following areas:
Navigation and SLAM
6.3 Working environment and usage guidelines¶
The working temperatures are:
Robot: +10ºC ~ +35ºC
The space where TIAGo OMNI Base operates should have a flat floor and be free of hazards. Specifically, stair-ways and other drop offs can pose an extreme danger. Avoid sharp objects (such as knives), sources of fire, hazardous chemicals, or furniture that could be knocked over.
Maintain a safe environment:
The terrain for TIAGo OMNI Base usage must be capable of supporting the weight of the robot (see Specifications section). It must be horizontal and flat. Do not use any carpet, to avoid tripping over.
Make sure the robot has adequate space for any expected or unexpected operation.
Make sure the environment is free of objects that could pose a risk if knocked, hit, or otherwise affected by TIAGo OMNI Base.
Make sure there are no cables or ropes that could be caught in the covers or wheels; these could pull other objects over.
Make sure no animals are near the robot.
Be aware of the location of emergency exits and make sure the robot cannot block them.
Do not operate the robot outdoors.
Keep TIAGo OMNI Base away from flames and other heat sources.
Do not allow the robot to come in contact with liquids.
Avoid dust in the room.
Avoid the use or presence of magnetic devices near the robot.
Apply extreme caution with children.
6.4 Battery manipulation¶
The following guidelines must be respected when handling the robot in order to prevent damage to the robot’s internal batteries.
Do not expose to fire.
Do not expose the battery to water or salt water, or allow the battery to get wet.
Do not open or modify the battery case.
Do not expose to ambient temperatures above 49ºC for over 24 hours.
Do not store in temperatures below -5ºC over seven days.
For long term storage (more than 1 month) charge the battery to 50%.
Do not use the TIAGo OMNI Base’s batteries for other purposes.
Do not use other devices but the supplied charger to recharge the battery.
Do not drop the batteries.
If any damage or leakage is observed, stop using the battery.
7 Safety measures in practice¶
7.1 Emergency stop¶
The emergency stop button can be found on the back of the robot between the power button and the battery level display. As the name implies this button may be used only in exceptional cases where the immediate stop of the robot is required.
To activate the emergency stop the user has to push the button. To deactivate the emergency stop the buttonhas to be rotated clockwise according to the indications on the button until it pops out.
- Pushing the Emergency button turns off the power of the robot. All electronic components of the robot, hardware controllers and computers included will be powered down. Be careful using this emergencystop action because the motors will be switched OFF.
After releasing the emergency stop button the user has to start the robot by using the power button.
7.2 Firefighting equipment¶
For correct use of TIAGo OMNI Base in a laboratory or location with safety conditions, it is recommended to have in place a C Class or ABC Class fire extinguisher (based on halogenated products), as these extinguishers are suitable for stifling an electrical fire.
If a fire occurs, please follow these instructions:
Call the firefighters.
Push the emergency stop button, as long as you can do so without any risk.
Only tackle a fire in its very early stages.
Always put your own and others’ safety first.
Upon discovering the fire, immediately raise an alarm.
Make sure the exit remains clear.
Fire extinguishers are only suitable for fighting a fire in its very early stages. Never tackle a fire if it is starting to spread or has spread to other items in the room, or if the room is filling with smoke.
If you cannot stop the fire or if the extinguisher runs out, get yourself and everyone else out of the building immediately, closing all doors behind you as you go. Then ensure the fire brigade are on their way.
7.3 Leakage¶
The battery is the only component of the robot that is able to leak. To avoid leakage of any substance from the battery, follow the instructions defined in section of storage_base, to ensure the battery is manipulated and used correctly
8 Robot Identification¶
The robot is identified by a physical label that can be found close to the power connector.
This label contains:
Business name and full address.
Designation of the machine.
Part Number (P.N.).
Year of construction.
Serial number (S.N.).

Figure: Identification label¶
9 Software recovery¶
9.1 Overview¶
This section explains the System and Software reinstall procedure for TIAGo OMNI Base.
9.2 Robot computer installation¶
To begin the installation process, plug a monitor and USB keyboard into the HDMI connector of the user panel.
BIOS configuration: Some options in the Control BIOS computer must be configured as follows:
Turn on the robot and press F2 repeatedly. Wait until the BIOS menu appears.
In System Performance, select ASUS Optimal.
Enter Advance Mode by pressing F7.
- In the Advanced > CPU Configuration menu:
Set Intel Adaptive Thermal Monitor to Disabled
Set Intel Virtualization Technology to Disabled.
- In the Advanced > CPU Configuration > CPU Power Management Configuration menu:
Set EIST to Disabled.
Set CPU C states to Disabled.
- In the Boot menu:
Set Wait for F1 if error to Disabled.
Go to Exit and select Save Changes & Reset.
Shut down the robot.
Installation: The installation is performed using the Software USB drive provided with TIAGo OMNI Base.
Insert the Software USB drive.
Turn on the robot and press F2 repeatedly. Wait until the BIOS menu appears.
Enter the Boot Menu by pressing F8 and select the Software USB drive.
The Language menu will pop up. Select English.
The menu shown in figure below.
Select Install TIAGo OMNI Base.
Select the keyboard layout by following the instructions.
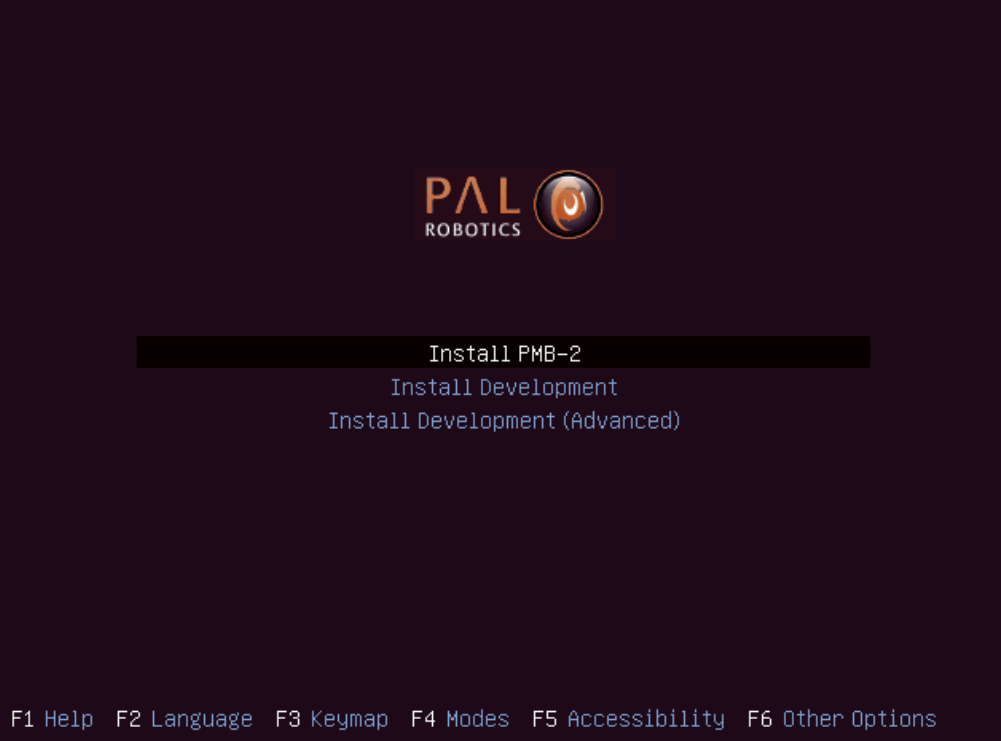
Figure: System installation menu¶
9.3 Development computer installation¶
Hardware installation: Connect the computer to the electric plug, the mouse and the keyboard. Internet access is not required as the installation is self-contained.
Software Installation: The installation is performed using the Software USB drive provided with TIAGo OMNI Base.
Insert the Software USB drive.
Turn on the computer, access the BIOS and boot the Software USB drive.
The Language menu will pop up. Select English.
The menu shown in next figure.
Choose Install Development (Advanced) if you wish to select a target partition in the development computer. Using the “Install Development” option will delete all partitions in the disk and automatically install the system in a new partition.
Select the keyboard layout by following the instructions.
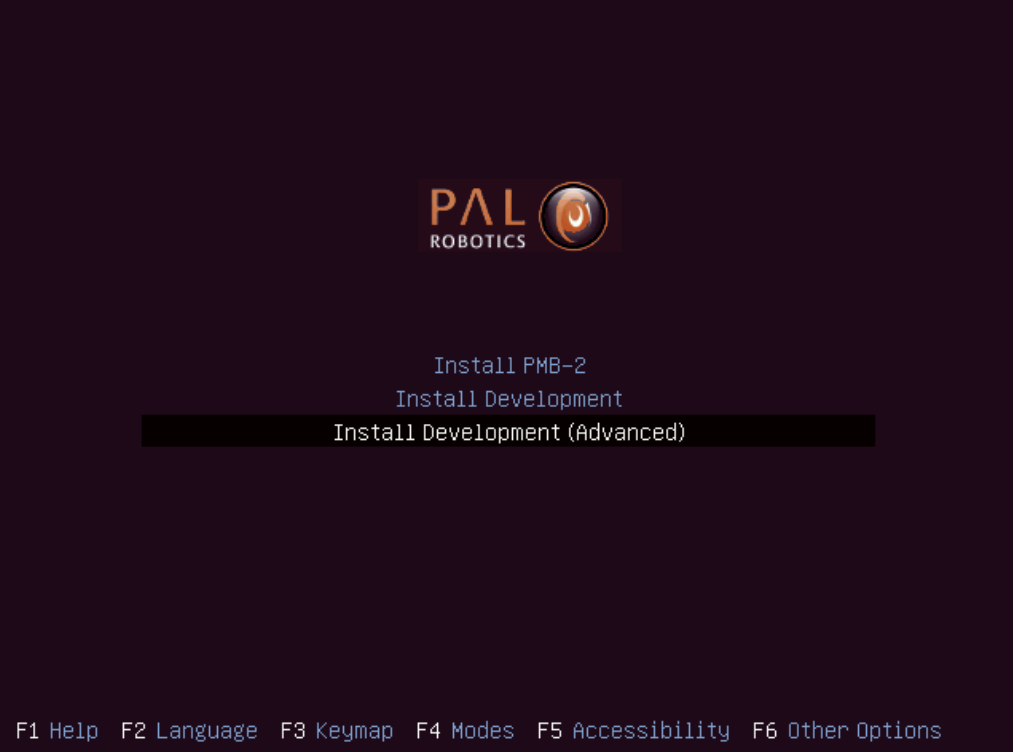
Figure: System installation menu¶
10 TIAGo OMNI Base Robot’s Internal Computers¶
10.1 TIAGo OMNI Base LAN¶
The name of TIAGo OMNI Base’s computer is omnibase-0c, where 0 needs to be replaced by the serial number of your robot. For the sake of clarity, hereafter we will use omnibase-0c to refer to TIAGo OMNI Base’s computer name.
In order to connect ot the robot, use ssh as follows:
ssh pal@omnibase-0c
10.2 Users¶
The users and default passwords in the TIAGo OMNI Base computers are:
root: Default password is palroot.
pal: Default password is pal.
aptuser: Default password is palaptuser
10.3 File system¶
The TIAGo OMNI Base robot’s computer has a protection against power failures that could corrupt the filesystem.
These partitions are created:
/: This is an union partition, the disk is mounted in /ro directory as read-only and all the changes arestored in RAM. So, all the changes are not persistent between reboots.
/home: This partition is read-write. Changes are persistent between reboots.
/var/log: This partition is read-write. Changes are persistent between reboots.
In order to work with the filesystem as read-write do the following:
root@omnibase-0c:~# rw
Remounting as rw...
Mounting /ro as read-write
Binding system files...
root@omnibase-0c:~# chroot /ro
rw command remounts all the partitions as read-write. Then with a chroot to /ro we have the same system than the default but all writable. All the changes performed will be persistent.
In order to return to the previous state do the following:
root@omnibase-0c:~# exit
root@omnibase-0c:~# ro
Remount /ro as read only
Unbinding system files
First exit command returns from the chroot. Then the ro script remounts the partitions in the default way.
10.4 Internal DNS¶
The control computer has a DNS server that is used for the internal LAN of the TIAGo OMNI Base with the domain name reem-lan. This DNS server is used by all the computers connected to the LAN.
When a computer is added to the internal LAN (using the Ethernet connector, for example) it can be added to the internal DNS with the command addLocalDns:
root@omnibase-0c:~# addLocalDns -h
-h shows this help
-u DNSNAME dns name to remove
Example: addLocalDns -u terminal
The same command can be used to modify the IP of a name: if the dnsname exists in the local DNS, the IP address is updated.
To remove names in the local DNS, exit the command delLocalDns:
root@omnibase-0c:~# delLocalDns -h
-h shows this help
-u DNSNAME dns name to remove
Example: addLocalDns -u terminal
These additions and removals in the local DNS are not persistent between reboots.
10.5 NTP¶
Since big jumps in the local time can have undesired effects on the robot applications, NTP is setup when the robot starts and before the ROS master is initiated. If no synchronization was possible, for example if the NTP servers are offline, the NTP daemon is stopped after a timeout.
To setup ntp as client edit the etc/ntp/.conf file and add your desired ntp servers. You can use your own local
time servers or external ones, such as ntp.ubuntu.com. You can also try uncommenting the default servers already present.
For example, if the local time server is in 192.168.1.6 add the following to the configuration file.
server 192.168.1.6 iburst
Restart the ntp daemon to test your servers.
systemctl restart ntp.service
Run the ntpq -p command and check that at least one of the configured servers has a nonzero reach value and a nonzero offset value.
The corrected date can be consulted with the date command.
Once the desired configuration is working make sure to make the changes in /etc/ntp.conf persistant and reboot the robot.
If, on the contrary, you want the robot to act as the NTP server of your network, no changes are needed. The current ntp daemon already acts as server. You will only need to configure NTP for the clients.
To configure NTP on the rest of the clients, like the development PCs, run:
systemct1 status ntp.service
If the service is active follow the previous steps to configure the ntp daemon. Once again a private or public NTP server can be used. If, instead the robot is desired as server add this line to /etc/ntp.conf.
server omnibase-0c iburst
If the service is not found then that means ntp is not installed. Either install it with apt-get install ntp or make use of Ubuntu’s default ntp client called timesyncd.
To configure timesyncd simply edit the /etc/systemd/timesyncd.conf file and set the proper NTP server.
Restart the timesyncd daemon.
systemctl restart systemd-timesyncd.service
Check the corrected date with the date command. The time update can take a few seconds.
10.6 System upgrade¶
For performing system upgrades connect to the robot, make sure you have Internet access and run the pal_upgrade command as root user.
This will install the latest TIAGo OMNI Base software available from the PAL repositories.
Reboot after upgrade is complete.
10.7 Firmware update¶
To update firmware, use the application described in section 10.6 System upgrade. Check for updates for the pal-ferrum-firmware-* packages and install them.
Before running the script, place the arm in a safe position with a support underneath it, as during the installation of the script, the arm can tumble.
Run the update_firmware.sh script, as shown below. The update will take a few minutes.
pal@omnibase-0c:~# rosrun firmware_update_robot update_firmware.sh
Finally, shut it down completely, power off with the electric switch and then power up the robot, as described in 3.2.6 User panel.
10.8 Meltdown and Spectre vulnerabilities¶
Meltdown and Spectre exploit critical vulnerabilities in modern processors.
Fortunately the linux Kernel has been patched to mitigate these vulnerabilities, this mitigation comes at a slight performance cost.
PAL Robotics configuration does not interfere with mitigation, whenever the installed kernel provides mitigation, it is not disable by our software configuration.
Below we provide some guidelines to disable the mitigation in order to recover the lost performance, this is not recommended by PAL Robotics and it is done on the customer’s own risk.
On this website the different tunables for disabling mitigation controls are displayed.
These kernel flags must be applied to the GRUB_CMDLINE_LINUX in /etc/default/grub. After changing them, update-grub must be executed, and the computer must be rebooted.
These changes need to be made in the persistent partition, as indicated in 10.3 File system
Be extremely careful when performing these changes, since they can prevent the system from booting properly.
11 Sensors¶
This section contains an overview of the sensors included in TIAGo OMNI Base, as well as their ROS and C++ API.
11.1 Description of sensors¶
Mobile base:
Laser range-finder. Located at the front of the base. This sensor measures distances in a horizontal plane. It is a valuable asset for navigation and mapping. Bad measurements can be caused by reflective or transparent surfaces.
Inertial Measurement Unit (IMU). This sensor unit is mounted at the center of TIAGo OMNI Base and can be used to monitor inertial forces and provide the attitude.
Detailed specifications of the above sensors are provided in the 3 Specifications section.
12 Sensor visualization¶
Most of TIAGo’s sensor readings can be visualized in rviz. In order to start the rviz GUI with a pre-defined configuration, execute the following from the development computer:
export ROS_MASTER_URI=http://omnibase-0c:11311
export ROS_IP=10.68.0.128
rosrun rviz rviz -d `rospack find omni_base_bringup`/config/omni_base.rviz
Make sure to use your robot’s serial number when exporting the ROS_MASTER_URI variable and to set your
development computer’s IP when exporting ROS_IP as explained in section ROScommunication
An example of how the laser range-finder is visualized in rviz is shown in figure below:
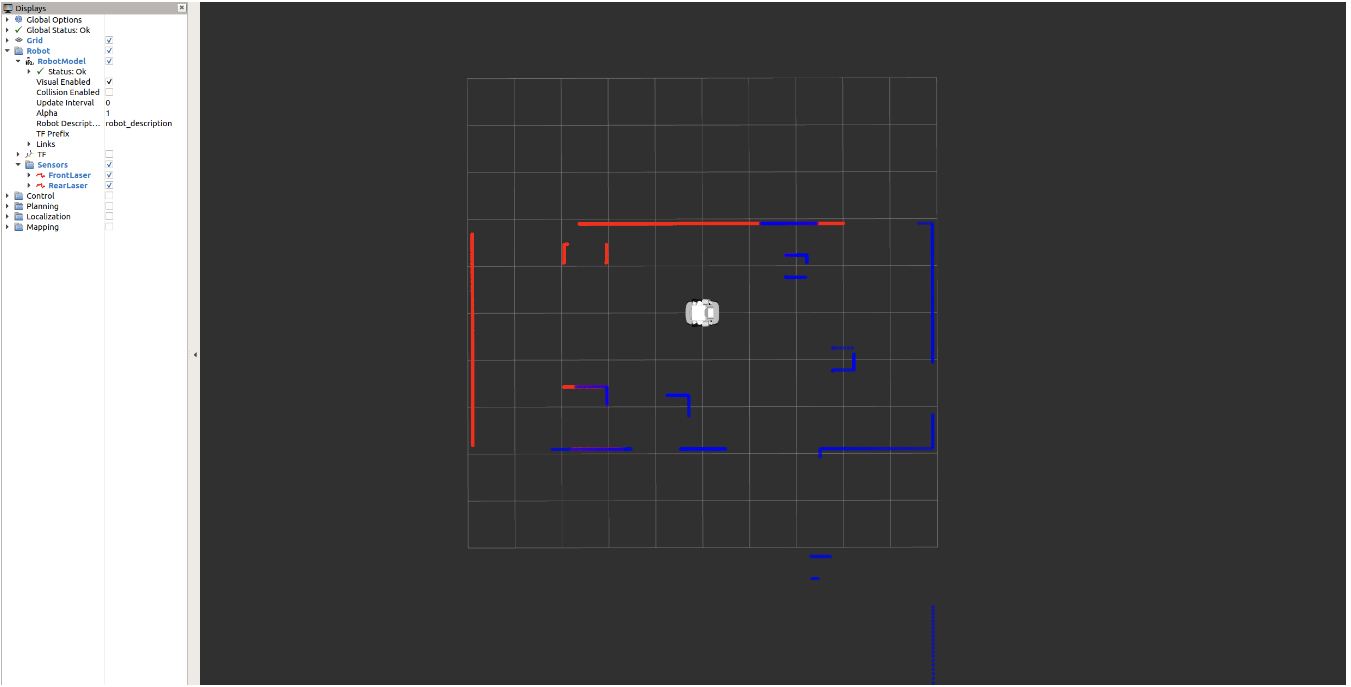
Figure: Visualization of the laser range-finder¶
13 Base motions¶
13.1 Overview¶
This section explains the different ways to move the TIAGo OMNI Base. The mobile base is based on an omnidirectional drive, which means that a linear and an angular velocity can be set, as shown in Head_parts. First, the motion triggers implemented in the joystick will be exposed, then the underlying ROS API to access the base controller will be presented.
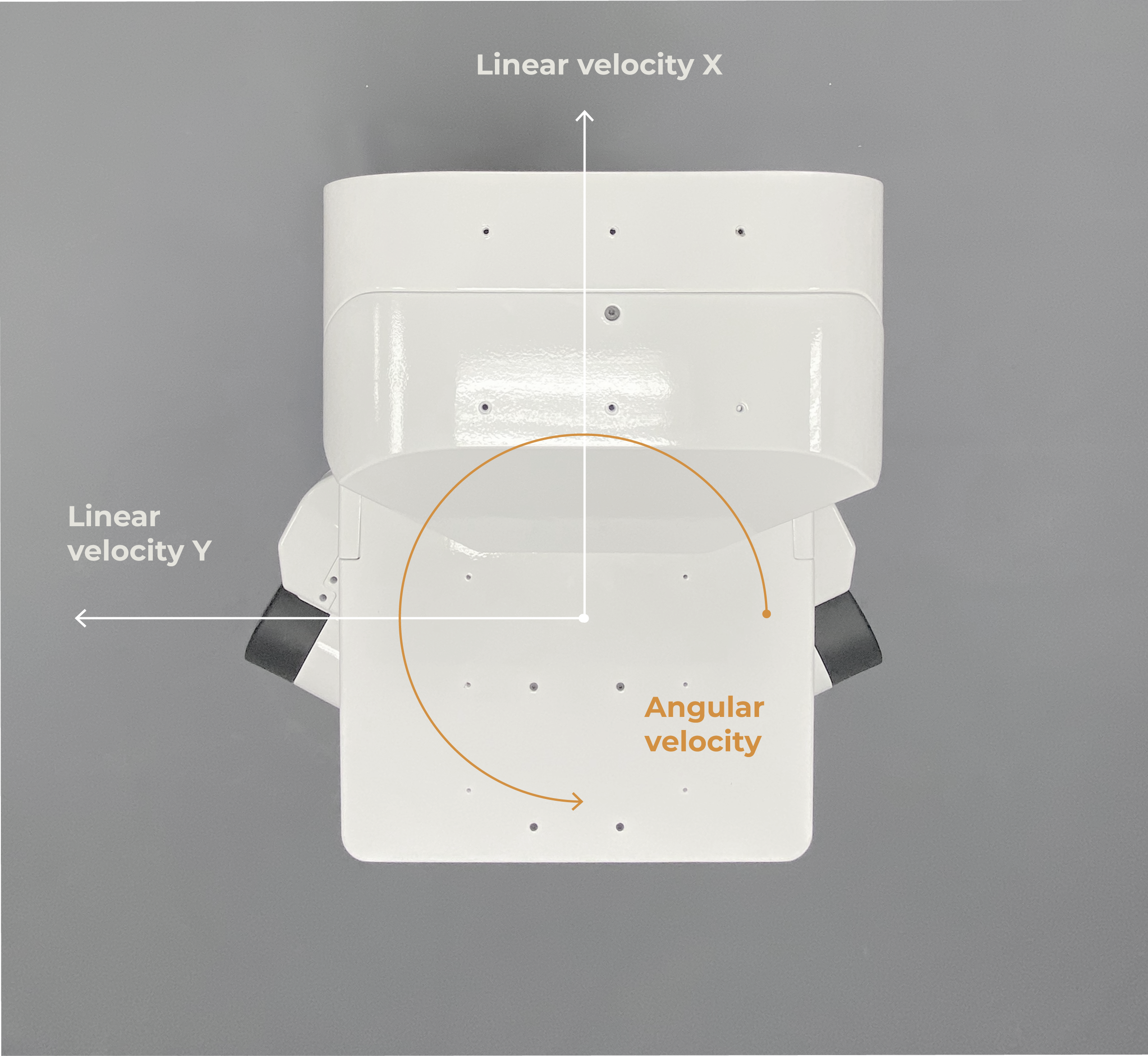
Figure: Mobile base velocities that can be commanded¶
13.2 Base motion joystick triggers¶
Firstly, the D-tab of your Logitech Controller joystick must be switched ON in order to activate the following functions.

Figure: D-tab switched ON¶
In order to start moving the base with the joystick, priority has to be given to this peripheral. In order to gain priority with the joystick, just press the button shown in the figure below. Release the priority by pressing the same button.

Figure: Taking priority with the joystick by pressing x¶
13.2.1 Forward/backward motion¶
To move the base forward, use the left analog stick, as shown in the figure below:

Figure: Base linear motion with the joystick¶
13.2.2 Lateral motion¶
To move the base laterally, use the left analog stick, as shown in the figure below:

Figure: Base lateral motion with the joystick¶
13.2.3 Rotational motion¶
In order to make the base rotate on its Z axis, the right analog stick has to be operated, as shown in the figure below:

Figure: Base Rotational motion with the joystick¶
13.2.4 Changing the speed of the base¶
The default linear and rotation speed of the base can be changed with the following button combinations: Press and hold the LB+RB buttons along with the Y button to gradually increase the speed.
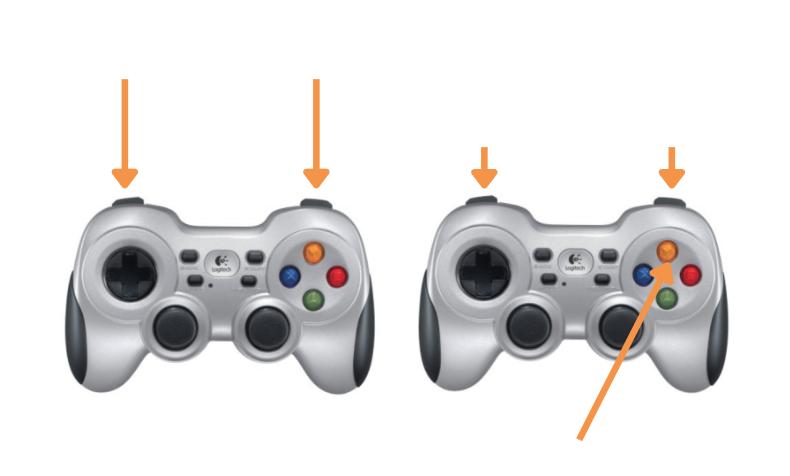
Figure: Joystick button combinations to increase speed¶
Press and hold the LB+RB buttons along with the A button to gradually decrease the speed
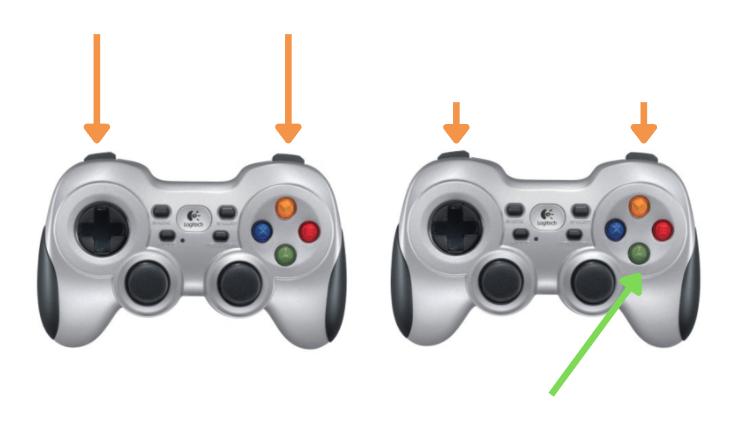
Figure: Joystick button combinations to decrease speed¶
13.3 Mobile base control ROS API¶
At user level, linear and rotational speeds can be sent to the mobile base controller using the following topic:
/mobile_base_controller/cmd_vel (geometry_msgs/Twist)
The given linear and angular velocities are internally translated to the required angular velocities of each of the four drive wheels.
13.4 Mobile base control diagram¶
Different ROS nodes publish velocity commands to the mobile base
controller through the /mobile_base_controller/cmd_vel topic. In
figure below, the default nodes
trying to gain control of the mobile base are shown. From one side,
there are velocities triggered from the joystick and from the other
side, there are commands from the move_base node, which is used by
the navigation pipeline that is presented in
section Navigation.
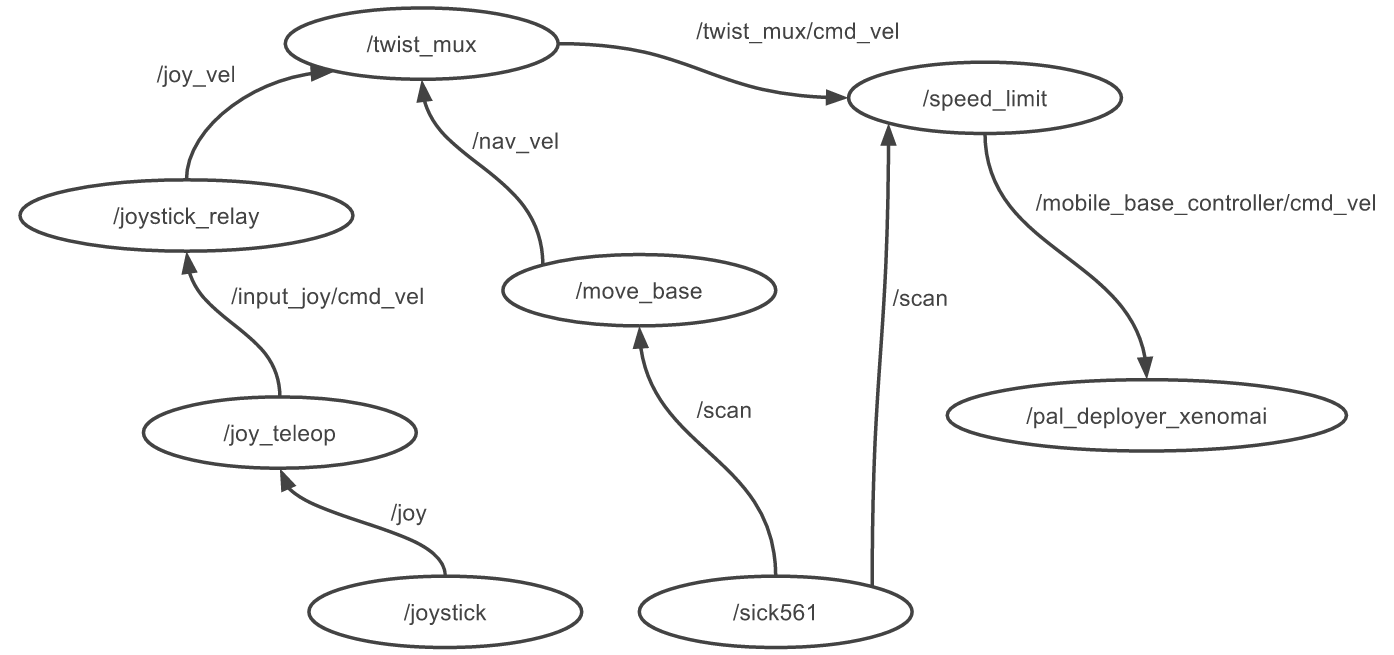
Figure: Mobile base control diagram¶
14 Navigation¶
14.1 Overview¶
This section details TIAGo OMNI Base’s autonomous navigation framework. The ROS 2D navigation stack is the basis of TIAGo OMNI Base’s navigation. The navigation software is composed of all the ROS nodes running in the robot that are able to perform SLAM - mapping and localization using the laser on the mobile base - and path planning to bring the robot to any map location, whilst avoiding obstacles and preventing collisions using laser and sonar readings.
14.2 Navigation architecture¶
The navigation software provided with TIAGo OMNI Base can be seen as a black box with the inputs and outputs shown in the figure below:
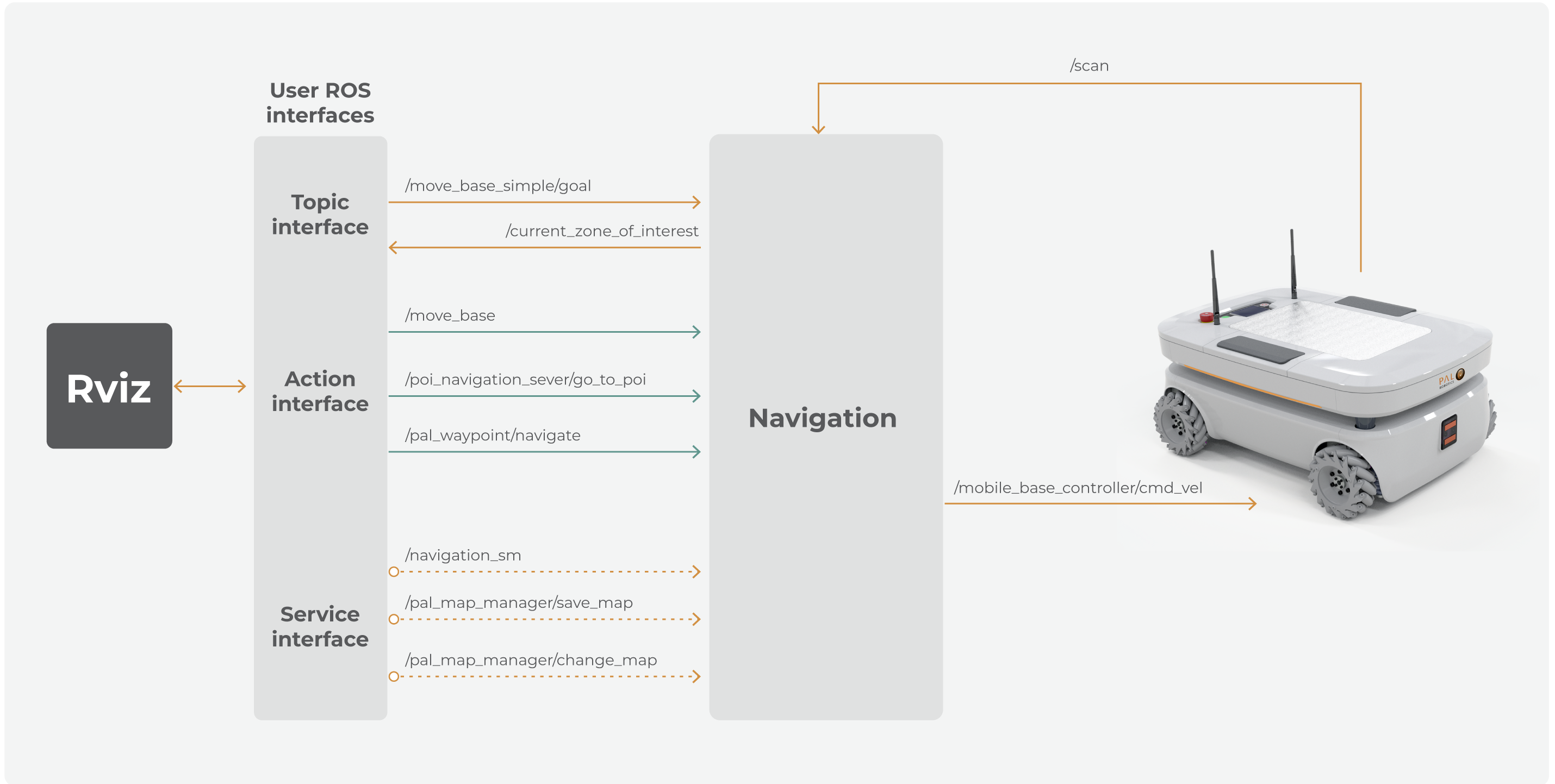
Figure: TIAGo OMNI Base navigation black box¶
As can be seen, the user can communicate with the navigation software through a ROS topic, three different ROS actions and one ROS service. Note that Rviz also can use these interfaces to help the user perform navigation tasks.
The ROS nodes comprising the navigation architecture are shown in the figure below. Note that nodes communicate using topics, actions and services, but also using parameters in the ROS param server (note depicted in the figure).
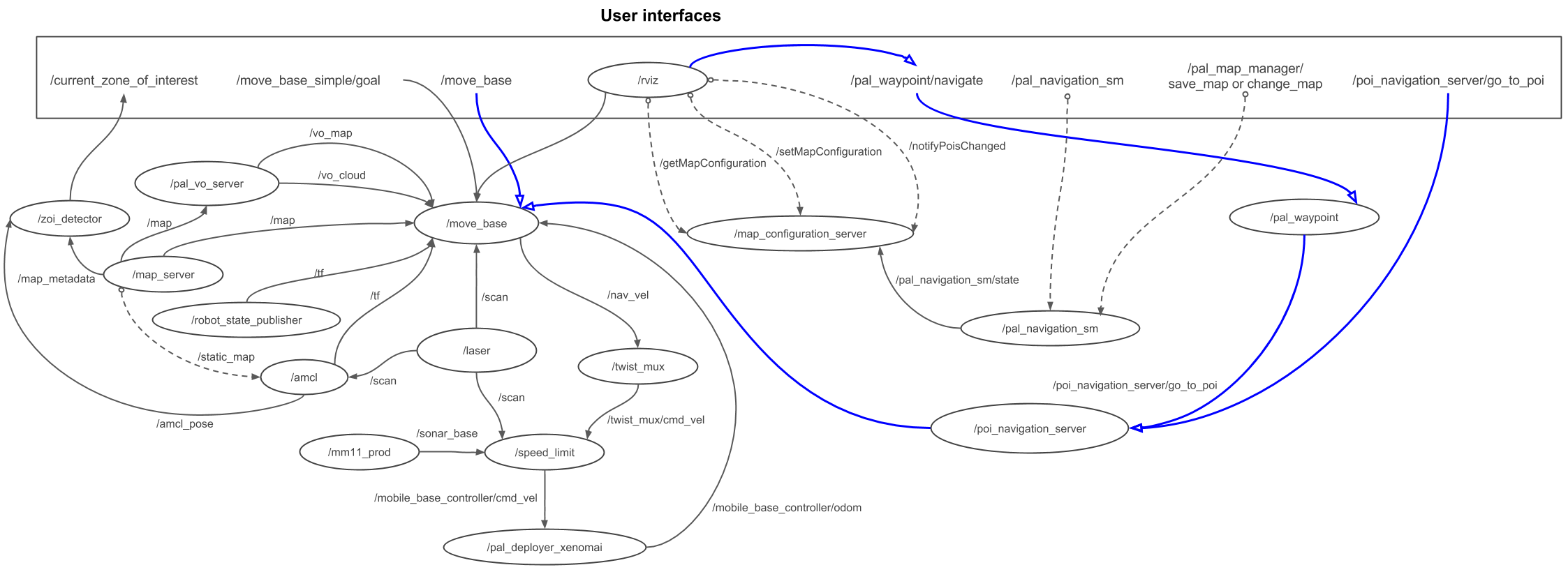
Figure: TIAGo OMNI Base navigation nodes overview¶
14.3 Navigation ROS API¶
14.3.1 Topic interfaces¶
/move_base_simple/goal(geometry_msgs/PoseStampled)Topic interface to send the robot to a pose specified in /map metric coordinates. Use this interface if no monitoring of the navigation status is required.
/current_zone_of_interest[1] (pal_zoi_detector/CurrentZoI)Topic to print the name of the zone of interest where the robot is at present, if any.
14.3.2 Action interfaces¶
/move_base(move_base_msgs/MoveBase)Action to send the robot to a pose specified in /map metric coordinates. Use of this interface is recommended when the user wants to be notified when the goal has been reached or if something fails in the process.
/poi_navigation_server/go_to_poi[2] (pal_navigation_msgs/GoToPOIAction)Action to send the robot to an existing Point Of Interest (hereafter POI) by providing its identifier. POIs can be set using the Map Editor, see 14.6 Map Editor (Premium advanced navigation package).
/pal_waypoint/navigate(pal_waypoint_msgs/DoWaypointNavigationAction)Action to make the robot visit all the POIs of a given group or subset. POIs and POI groups can be defined using the Map Editor, see 14.6 Map Editor (Premium advanced navigation package).
14.3.3 Service interface¶
/pal_navigation_sm(pal_navigation_msgs/Acknowledgment)Service to set the navigation mode to mapping or to localization mode.
In order to set the mapping mode:
rosservice call /pal_navigation_sm "input: 'MAP'"
In order to set the robot in localization mode:
rosservice call /pal_navigation_sm "input: 'LOC'"
In the localization mode, the robot is able to plan paths to any valid point on the map.
/pal_map_manager/save_map(pal_navigation_msgs/SaveMap)Service to save the map with a given name. Example:
rosservice call /pal_map_manager/save_map "directory: 'my_office_map'"
The directory argument is the name of the map. If empty, a timestamp will be used. The maps are stored in $HOME/.pal/pmb2_maps/configurations.
/pal_map_manager/change_map(pal_navigation_msgs/Acknowledgment)Service to choose the active map. Example:
rosservice call /pal_map_manager/change_map "input: 'my_office_map'"
14.3.4 Dynamic parameter interface¶
There are several dynamic parameters available to tune the navigation of the robot:

Figure: rqt_reconfigure with the dynamic parameters to tune for the navigation¶
This can be accessed via rqt_reconfigure on simulation or after doing the ROS_IP and ROS_MASTER_URI for the real robot:
rosrun rqt_reconfigure rqt_reconfigure
Here is a list with an explanation of the most important ones:
Under /advanced_nav_head:
z_target (Only available for the advanced navigation premium package) defines the angle of the head while navigating in advanced mode, the higher the value the more up it will look. This parameter is useful if you need to be able to see a little more ahead but keep in mind that it will not be able to detect small objects just in front of it if the value is too high. Be extra careful when tuning this parameter.
Under /move_base/PalLocalPlanner:
max_vel_x defines maximum velocity in forward motions during the navigation.
acc_lim_x defines maximum acceleration in forward motions during the navigation. This can be useful to lower in case of a slippery floor for example.
max_vel_y and acc_lim_y can also be tuned the same way only when using the omnidirectional base.
xy_goal_tolerance defines the zone of tolerance in centimeters of the navigation goal.
yaw_goal_tolerance defines the tolerance angle in radians of the navigation goal.
Under /amcl other parameters can be tuned to improve the localization:
odom_alpha1 specifies the expected noise in odometry’s rotation estimate from the rotational component of the robot’s motion.
odom_alpha2 specifies the expected noise in odometry’s rotation estimate from the translational component of the robot’s motion.
odom_alpha3 specifies the expected noise in odometry’s translation estimate from the translational component of the robot’s motion.
odom_alpha4 specifies the expected noise in odometry’s translation estimate from the rotational component of the robot’s motion.
odom_alpha5 Translation-related noise parameter (only used if the model is “omni”).
update_min_d translational movement required before performing a filter update.
update_min_a rotational movement required before performing a filter update.
14.4 SLAM and path planning in simulation¶
14.4.1 Mapping¶
The mapping system uses the readings provided by the 2D laser scanner while the robot is moved with the keyboard or joystick.
The map obtained is an Occupancy Grid Map (OGM) that can later be used to make the robot localize and navigate autonomously in the environment.
Run the simulator and mapping functionality with the following launch file :
source /opt/pal/${PAL_DISTRO}/setup.bash
roslaunch omnibase_0_gazebo omnibase_mapping.launch
The Gazebo window shown in the figure below will open and the robot should be visible in an office-like environment. Furthermore, a Rviz window will open where the robot model, sensor and map being built will be visualized.

Figure: Small office world simulated in Gazebo¶
If you have a USB joystick plugged into your computer, it will be used to control the robot. Otherwise, the following command could be run in a terminal to control the robot with the keyboard arrow keys:
rosrun key_teleop key_teleop.py
While moving the robot around the environment, the map will start to appear in Rviz, as shown in the sequence of snapshots in the figure below.
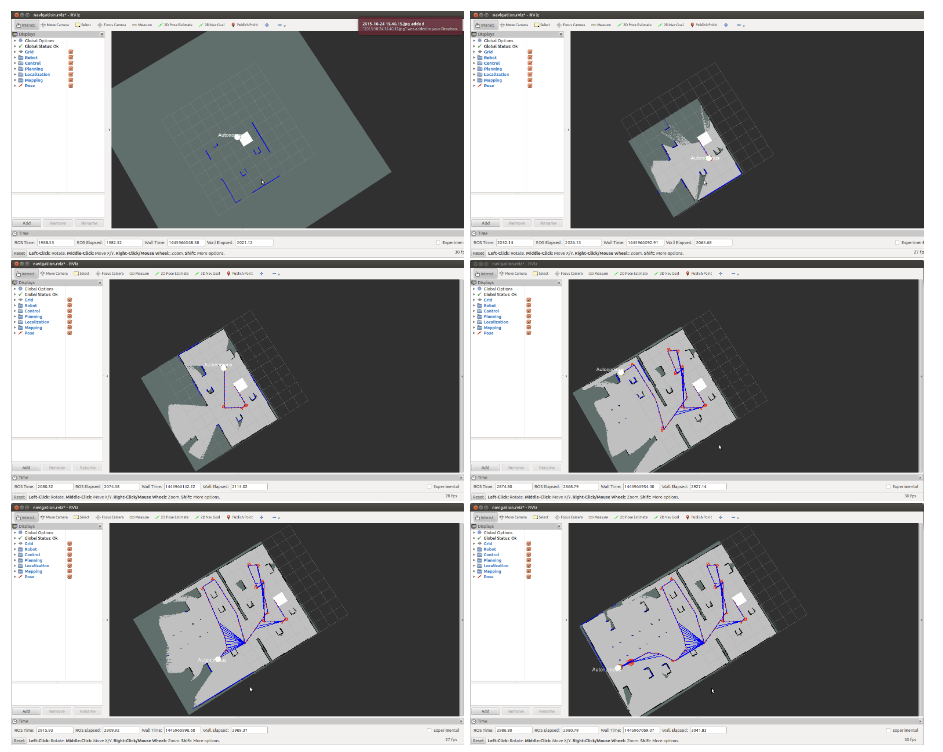
Figure: Partial maps built by the SLAM algorithm, starting (top left) and moving until a successful map is built (bottom right). The SLAM graph is represented by the nodes (red dots) and edges (blue segments).¶
14.4.2 Saving the map¶
The map can be saved manually as many times as required in the current directory by executing:
rosrun map_server map_saver
This command saves two files (as shown in the figure below): a map.pgm image file and a map.yaml configuration file. They will both be saved in the folder where the terminal is opened.

Figure: Output of map_saver call¶
The map.pgm file will contain a graphic representation of the map that has been built.
To save the map in the right path automatically, please use the save_map service :
rosservice call /pal_map_manager/save_map "directory: ''"

Figure: Output of map_saver call¶
The map will be named with the date and time it was saved, as in figure Figure: Output of map_saver call.
The save_map service will store all the map files in the path $HOME/.pal/omnibase_maps/configurations.
The current map in use is the one pointed to by the symbolic link $HOME/.pal/omnibase_maps/config.
Once mapping is finished, in order to save the map and start the localization mode, the following command should be used:
rosservice call /pal_navigation_sm "input: 'LOC'"
14.4.3 Localization and Path Planning¶
To run a simulation with the robot in localization and path planning mode, run:
roslaunch omnibase_0_gazebo omnibase_navigation.launch
A Gazebo window will open, with the robot in the same office-like environment, but this time the rviz window shown in the figure below will show the map, localization particles, localized robot model, laser sensor readings and some virtual obstacles.
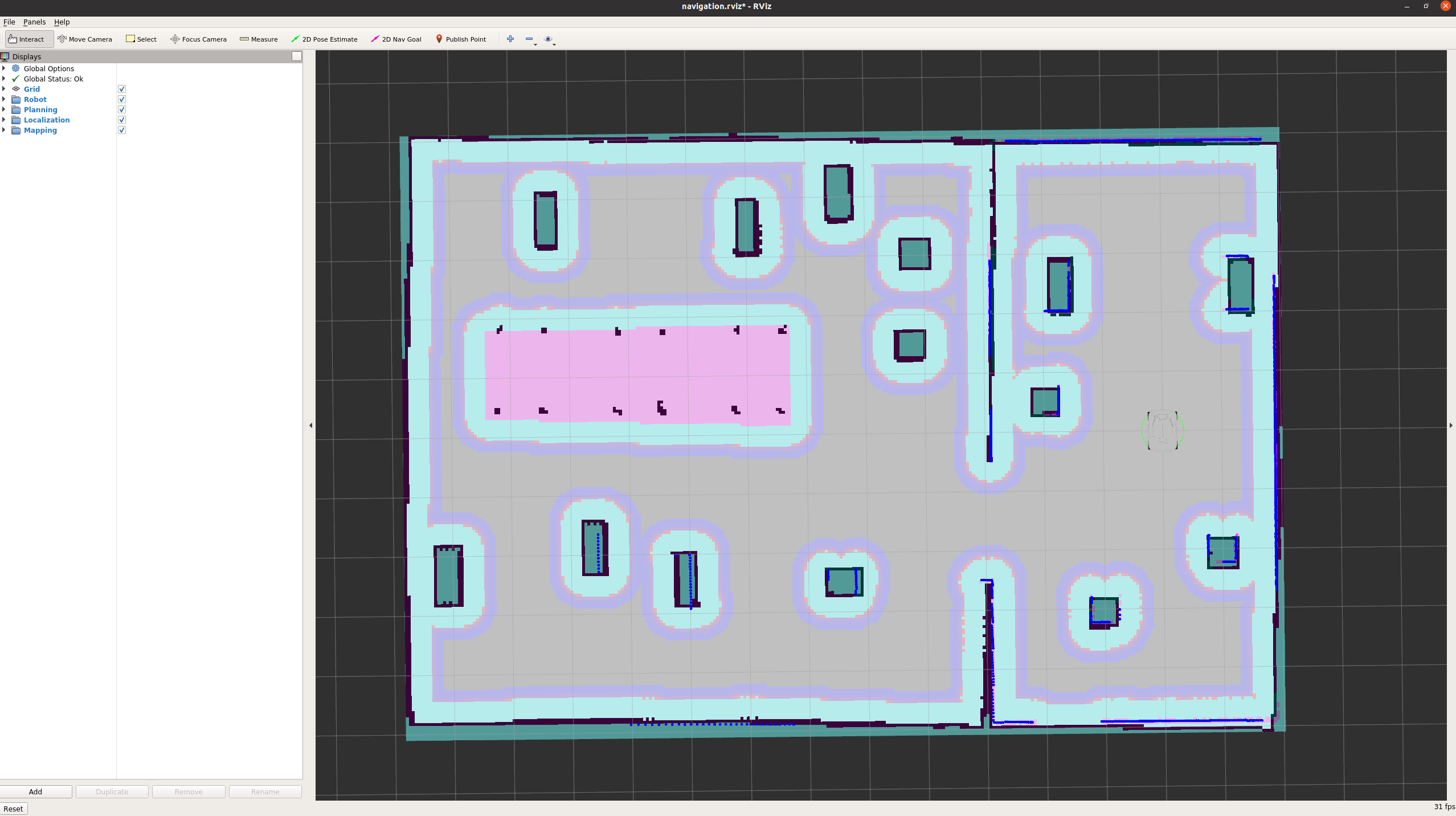
Figure: Small office world simulated navigation as visualized in rviz after running roslaunch omnibase_2dnav_gazebo omnibase_navigation.launch¶
To choose a goal, the user should select the “2D Nav Goal” tool in rviz (clicking on it with the left mouse button), as shown in the figure below then click on the map to select the target location the robot has to reach.
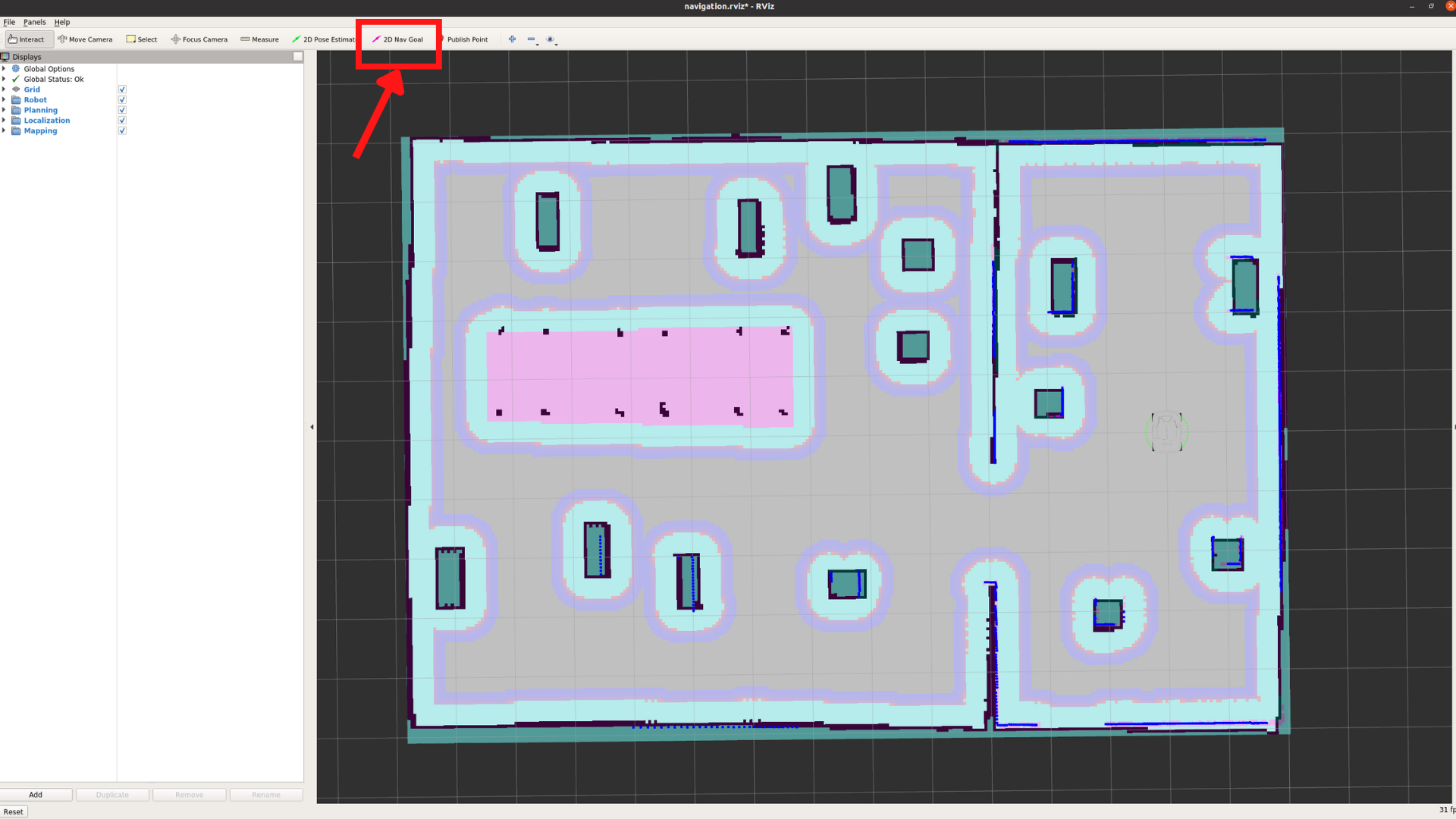
Figure: “2D Nav Goal” tool in rviz should be clocked before selecting in the map the target location the robot has to reach.¶
The plan will be generated and the robot will start moving along the trajectory toward the goal, as illustrated in the sequence of snapshots in the figure below:
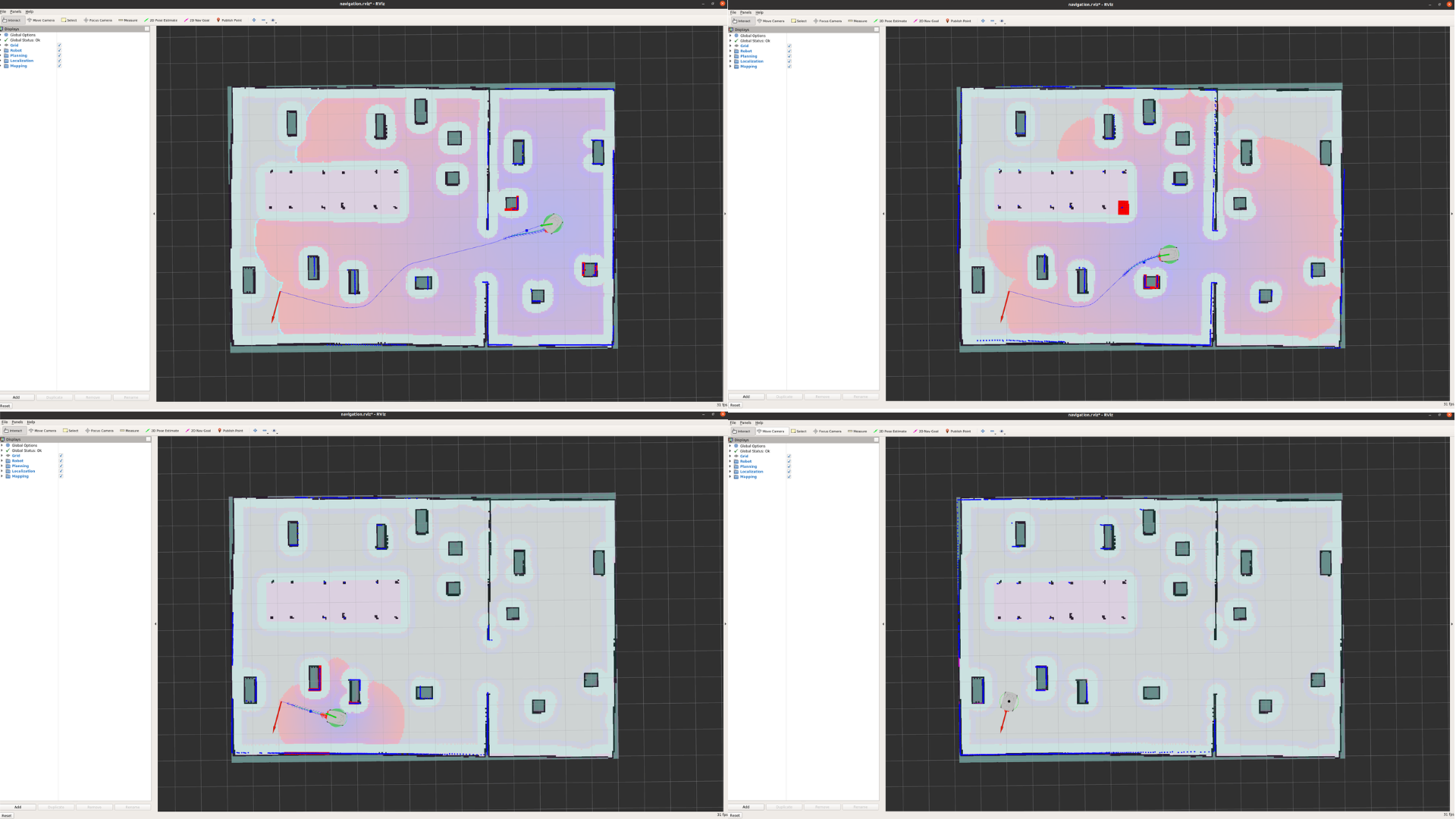
Figure: Autonomous navigation the robot continuously localizes itself on the map, plans the path for reaching the target location and executes velocity commands for following the trajectory and avoiding obstacles. Costmaps and inflated obstacles are visible.¶
14.5 SLAM and path planning on the robot¶
Important
Before continuing with the instructions of this section make sure that the robot computer is able to resolve the development computer hostname, as explained in section ROScommunication. Otherwise, some
commands will not work with the real robot due to communication failures between the robot’s computer and the development computer. For the sake of clarity and without loss of generality hereafter
we will assume that the development computer’s IP is 10.68.0.128, which will be set in the ROS_IP environmental variable when needed according to section ROScommunication. The user will have to adapt the
examples below to set the right IP address. Furthermore, make sure that the charger is not plugged into the robot’s back connector, otherwise, it will not move.
Note that when the charger is plugged into the robot’s back connector the Navigation functionality is paused for safety. The status of the functionality can be checked in the Webcommander diagnostics
tab, see figure below. Alternatively, the status can be checked in /pause_navigation topic, which reports a boolean specifying whether the functionality is paused.
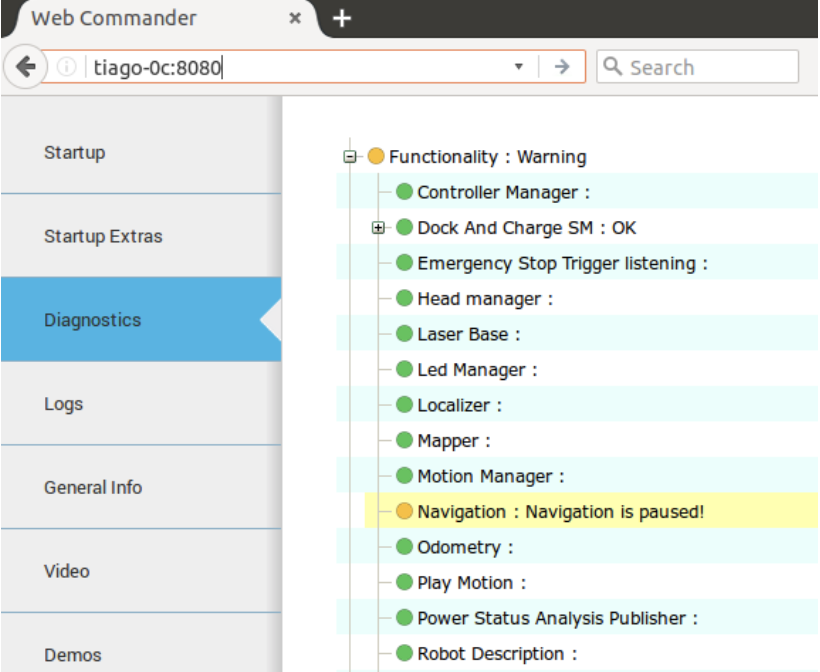
Figure: Navigation functionality paused due to connected charger.¶
When the robot boots, the navigation pipeline starts automatically. Furthermore, the localization mode based on the last map will be active.
On the development computer:
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosservice call /pal_navigation_sm "input: 'MAP'"
In order to visualize the map in rviz from your development computer, run the following command:
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosrun rviz rviz -d 'rospack find omnibase_2dnav'/config/rviz/navigation.rviz
When the service has finished switching between localization and mapping, you can start moving the robot around with the joystick or via key_teleop to map the environment. You can see in rviz the map creation and updates.
To create a good map you would need to go to all the places that you want to map and you can follow close loop trajectories as shown below:

Figure: Mapping process to get a good map of the environment¶
14.5.1 Saving the map on the robot¶
The map can be saved on the development computer in the current directory by executing the following from a terminal:
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosrun map_server map_saver
To save the map built in the robot, please use the save_map service:
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosservice call /pal_map_manager/save_map "directory: ''"
The save_map service will store all the map files in the path
$HOME/.pal/omnibase_maps/configurations in the robot’s file system. The current map in use is the one pointed to by the symbolic link $HOME/.pal/omnibase_maps/config.
In order to automatically save the map, finish mapping and start using the map for localization and path planning, use the following command:
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosservice call /pal_navigation_sm "input: 'LOC'"
14.5.2 Localization and path planning¶
Localization and path planning start automatically during boot-up. A specific rviz configuration file for navigation is provided in omnibase_2dnav. In order to launch rviz using this configuration file, do the following:
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosrun rviz rviz -d 'rospack find omnibase_2dnav'/config/rviz/navigation.rviz
To choose a goal, the user should select the “2D Nav Goal” tool in rviz (clicking on it with the left mouse button), as shown in figure “2D Nav Goal” then click in the map to select the target location the robot has to reach.
The plan will be generated and the robot will start moving along the trajectory towards the goal, as illustrated in the sequence of snapshots in figure in autonomous navigation.
If the robot does not move, make sure that the ROS_IP variable has been set with the right IP address of the development computer.
Navigation goals can be sent programmatically to the Action Server /move_base_simple.
14.5.3 Changing the active map on the robot¶
When the navigation is in localization mode, any of the maps stored in $HOME/.pal/omnibase_maps/configurations can be selected. In order to select a map, use the following command:
ssh pal@omnibase-0c rosservice call /pal_map_manager/change_map "input: 'MAP_NAME'"
where MAP_NAME is the name of the map that we want to select.
14.6 Map Editor (Premium advanced navigation package)¶
As seen in the previous sections with rviz, we can easily visualize the mapping process. In the localization mode, it is then possible to send the robot to any point on the map and provide a new localization estimate when necessary.
The PAL Map Editor [3] is a rviz plugin that provides advanced navigation functionalities to rviz, including:
Downloading and uploading maps
Re-naming maps
Changing the active map
Definition of Zones Of Interest (ZOIs)
Definition of Points of Interest (POIs) and groups of POIs
Definition of Virtual Obstacles (VOs)
The information about POIs, ROIs and VOs are stored along with the map as meta-data.
A graphical joystick is also provided to remotely teleoperate TIAGo OMNI Base’s mobile base.
In order to launch rviz with the Map Editor plugins, do the following:
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosrun rviz rviz -d 'rospack find omnibase_2dnav'/config/rviz/advanced_navigation.rviz
In order to ensure that rviz works properly, make sure that the robot computer is able to resolve the development computer hostname, as explained in section ROScommunication.
The different plugins added to rviz are shown in the figure below:
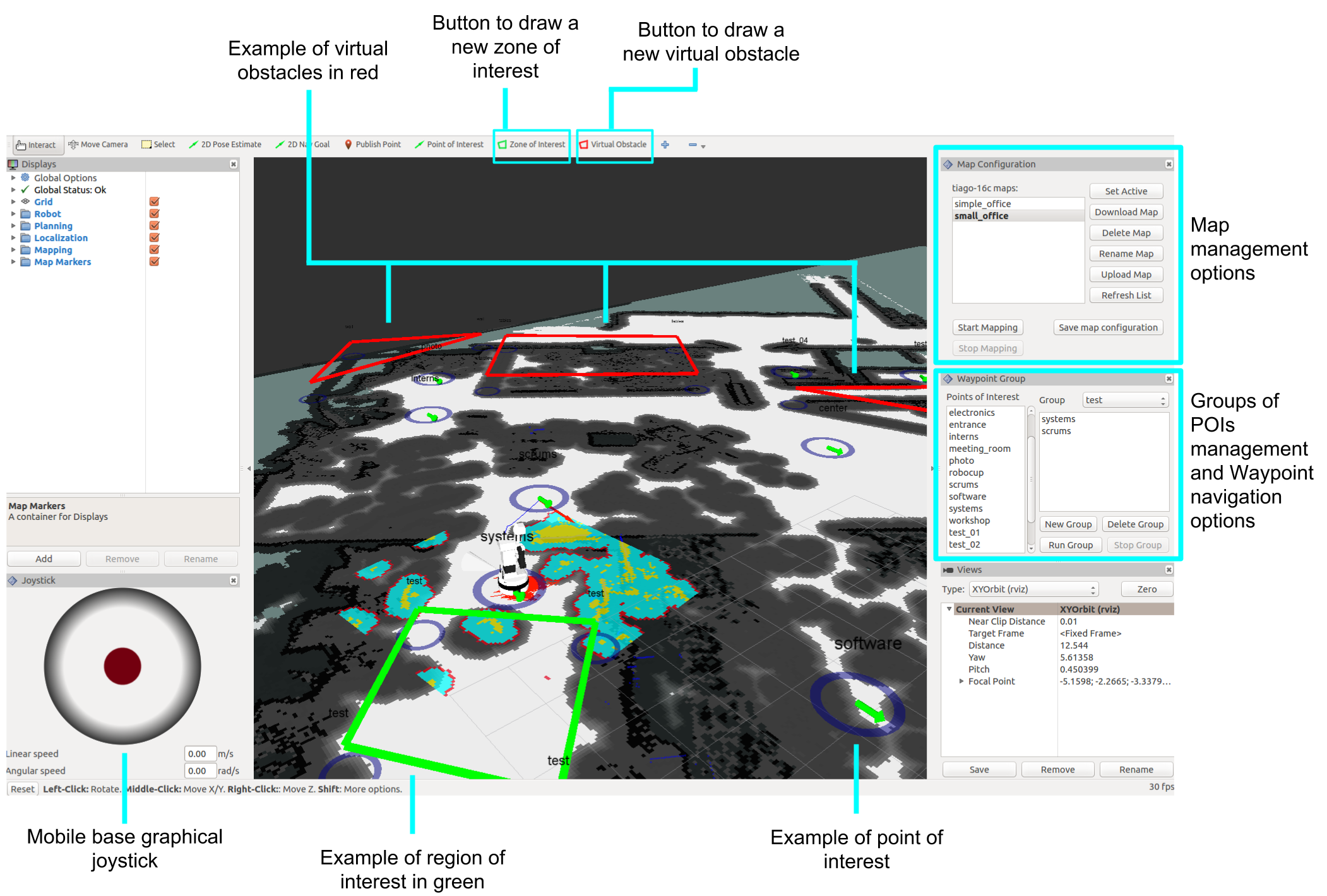
Figure: Rviz with the Map Editor plugins¶
14.6.1 Launching the Map Editor¶
In order to run the Map Editor in a development computer the following commands can be used in simulation and with a real robot.
Simulation
roslaunch omnibase_0_gazebo omnibase_navigation.launch
Real robot
export ROS_MASTER_URI=http://omnibase-0c:11311 export ROS_IP=10.68.0.128 rosrun rviz rviz -d 'rospack find omnibase_2dnav'/config/rviz/advanced_navigation.rviz
In both cases, when running the Map Editor for the first time an example of a map will be loaded.
14.6.2 Creating a map¶
In order to create a new map the button Start Mapping, in the Map Configuration panel, must be pressed. The robot base can be then teleoperated using the robot’s joystick, the key_teleop package or
the graphical joystick of the Map Editor. Once the robot has mapped all the areas of interest the user has to press the Stop Mapping. This will create a new map on the robot with a name consisting of a timestamp.
The figure below shows the process of mapping in the Map Editor: on the top-right picture the previous active map
is shown. At its right the status after starting mapping. The lower row shows the map under creation and the complete map after pressing the Stop Mapping.
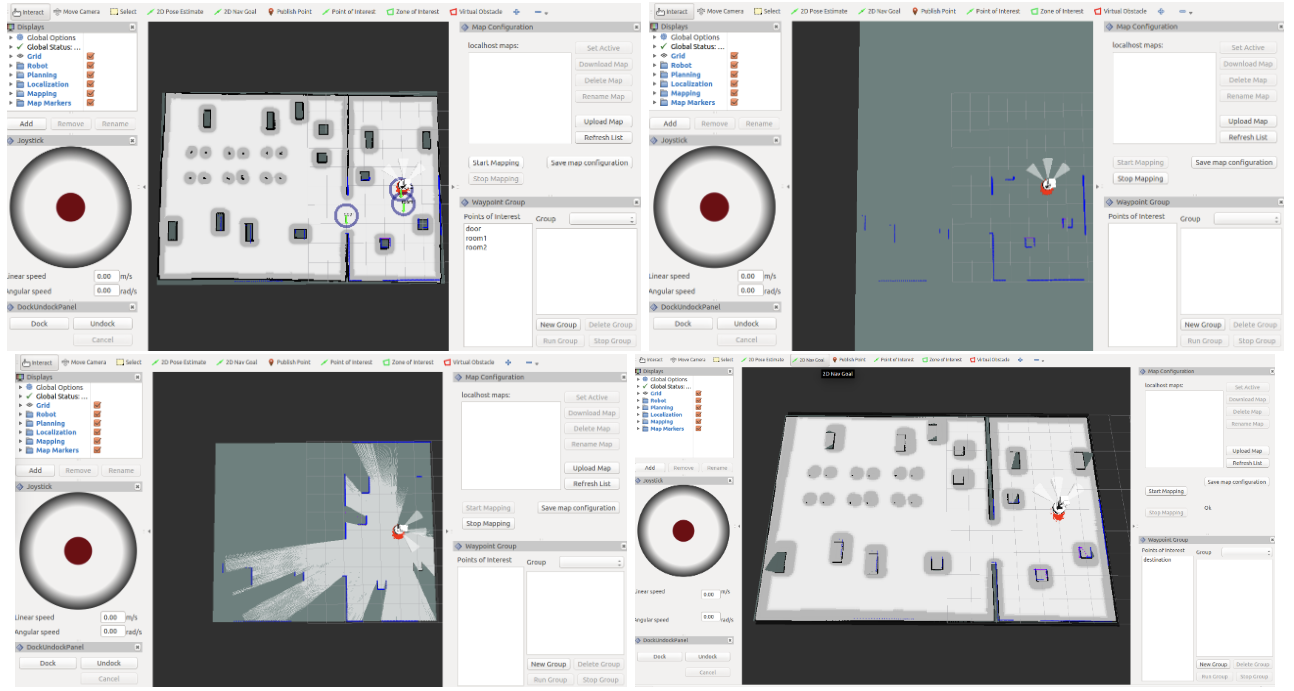
Figure: Map creation using the Map Editor¶
14.6.3 Managing maps¶
In order to list all the maps stored in the robot the button Refresh List of the Map Configuration panel must be pressed. The list of available maps will appear in the panel as shown in the figure below. Note that the one printed in bold is the active one.

Figure: Management of maps¶
Map operations available are:
Set Active: the map selected in the list will be loaded and used for navigation.
Download Map: this button saves the selected map in the list in the path of the local computer running the Map Editor specified by the user.
Delete Map: removes the selected map in the robot’s computer.
Rename Map: change the name of the selected map.
Upload Map: copy a map from the local computer to the robot’s computer.
14.6.4 Defining Points of Interest¶
A Point of Interest is a pose in the map defined by a set of coordinates and orientation. Once a POI is defined
and stored in the map meta-data the robot can be sent to the POI using the go_to_poi action interface explained in section 14.3.2 Action interfaces
To create a new POI the button Point of Interest on the top bar of the Map Editor must be pressed.
Then move the mouse to the desired map location, press the mouse’s left button and drag the mouse to define
the orientation of the POI. Release the mouse’s button when the green arrow that will appear points to the
desired direction and sense. Afterward, a dialog requesting the name of the POI will show up as shown in
Figure: Definition of POIs. After accepting it the POI will be created. In order to get these meta-data permanently stored press Save map configuration.
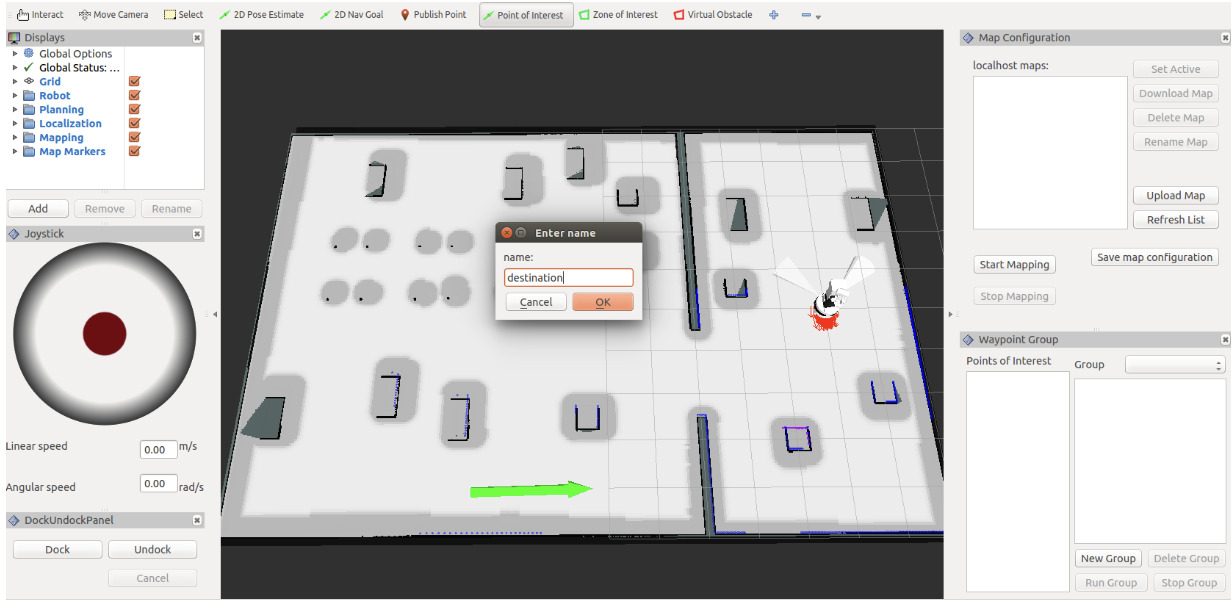
Figure: Definition of POIs¶
14.6.5 Defining Zones of Interest¶
Zones of Interest provide a simple way to have topological localization, i.e. obtain the name of the zone of the map where the robot is located. A ZOI can be defined by pressing the Zone of Interest button on the top
bar of the Map Editor. By clicking on a map point the user specifies the central position of the ZOI. Afterward, a dialog requesting the name of the zone and then another requesting how many points will be used to define
the zone will appear, see Figure: Definition of ZOIs. A green polygon with the selected number of vertices will appear on the selected map point. The user can then drag the vertices with the mouse to define the final placement of the
Zone of Interest. Note that in order to move a vertex of the zone the mouse icon must be placed on top of the blue circle, the color of the circle will vary slightly, before clicking on it and dragging it.

Figure: Definition of ZOIs¶
After all the ZOIs are defined the Save map configuration will store the corresponding map meta-data. Any time the robot enters any of the ZOIs, the topic /current_zone_of_interest will print the name of the ZOI.
14.6.6 Defining Virtual Obstacles¶
Virtual obstacles are of key importance to prevent some dangerous situations during navigation, like falling downstairs or colliding with obstacles not clearly visible to the robot’s sensors, and to label forbidden areas
where the robot is not allowed to enter. The VOs are created the same way as the ZOIs by pressing the Virtual Obstacle button on the top bar of the Map Editor. VOs are represented with red polygons, see
Figure: Definition of Virtual Obstacles. In order to store the meta-data defining the VOs the user must press Save map configuration.
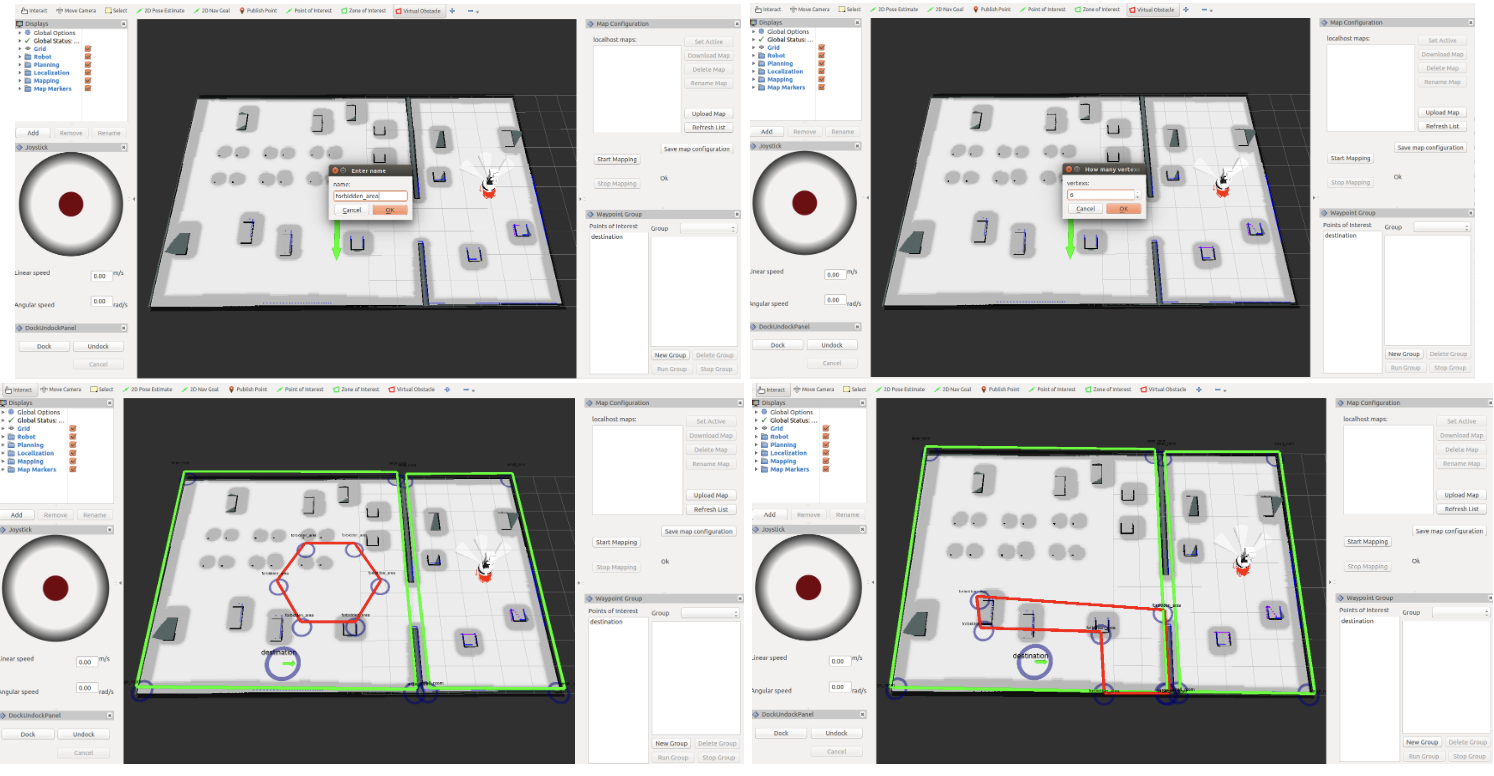
Figure: Definition of Virtual Obstacles¶
14.6.7 Defining Groups of POIs¶
After defining POIs the user can define groups of different POIs. A group of POIs can be run so that the robot visits in sequence all the POIs in the group. To create groups of POIs the panel Waypoint Group is
provided. The list on the left of the panel shows all the POIs created. First press New Group to define a new group of POIs. A dialog requesting the name of the group will appear, see Figure: Definition of POI groups. In order to add POIs first
select the POI on the left list and drag it to the panel of its right. The same POI can be set to a group multiple times. When the group contains all the desired POIs press the Save map configuration.
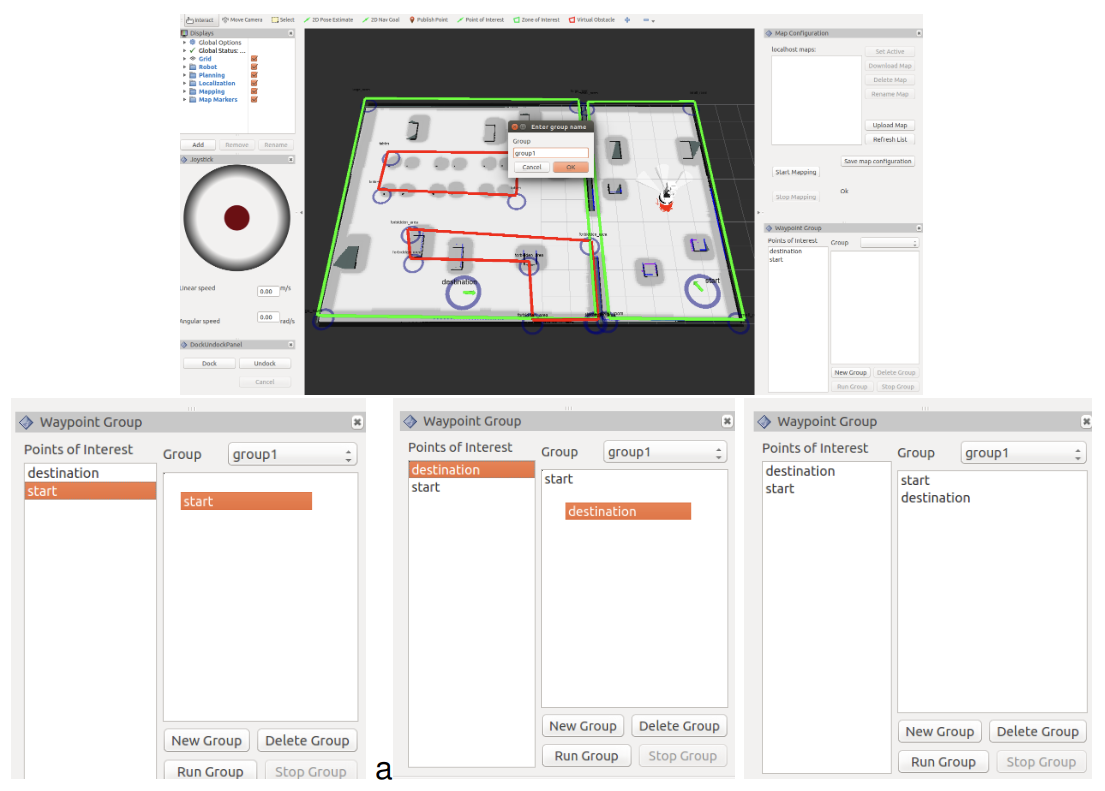
Figure: Definition of POI groups¶
The robot will visit in sequence all the POIs in a group when the group is selected in the dropdown list named Group and when pressing the Run Group. The task can be canceled at any time by pressing the
Stop group. The Figure: Running a POI group shows the robot running a group of 2 POIs and avoiding VOs. In order to run a group of POIs the action interface /pal_waypoint/navigate is available.
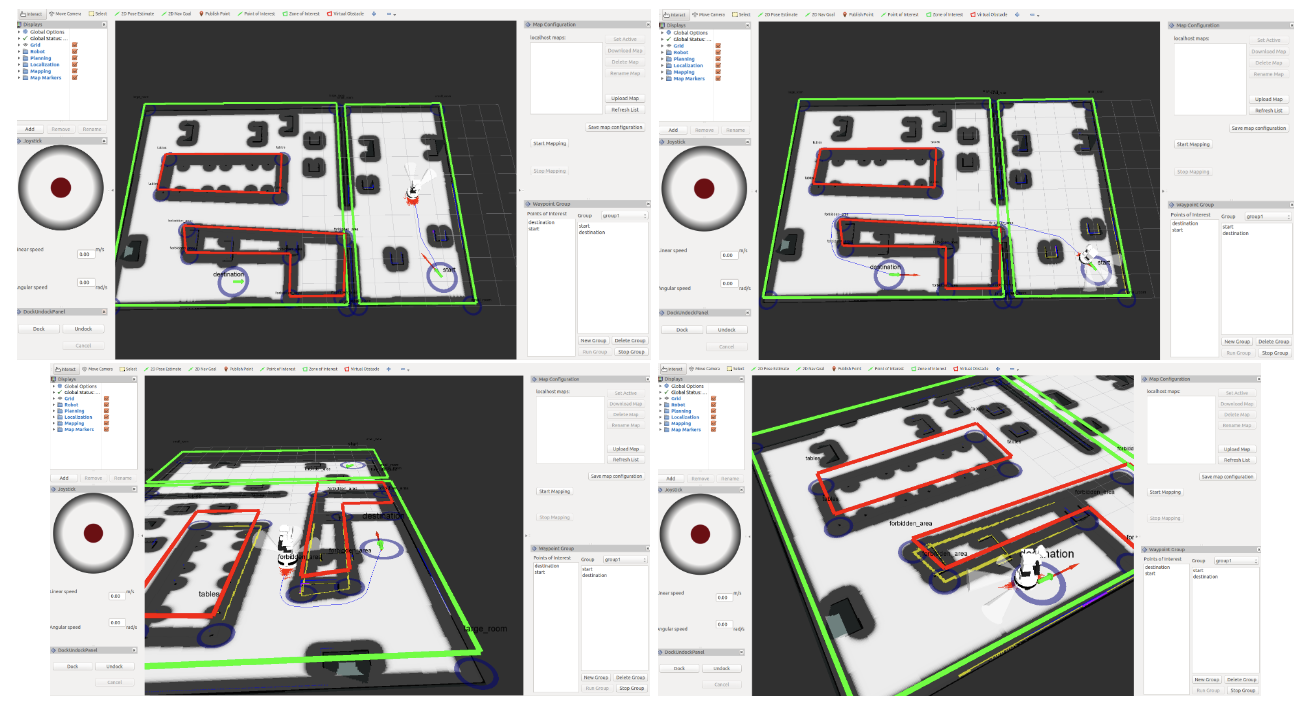
Figure: Running a POI group¶
14.6.8 Modifying map meta-data¶
The POIs, ZOIs and VOs can be modified at any time or removed by placing the mouse icon on top of their blue circle and clicking on the right button. A popup menu will appear providing different options: removing the POI or in the case of ZOIs and VOs adding a new vertex, removing a vertex or removing the whole ZOI or VO.
After any modification of the POIs, ZOIs or VOs remember to press Save map configuration to store the changes permanently in the map.

Figure: Example of meta-data modification¶
15 Dock station¶
15.1 Overview¶
Depending on the version acquired, your TIAGo OMNI Base may include a dock station that allows the robot to recharge itself automatically. This section will describe the components of the dock station and how to use integrate it with your algorithms.
15.2 The Dock Station Hardware¶
The dock is composed of a metal structure containing a pattern detected by TIAGo ’s LIDAR sensor, a connection to the external charger and the power contacts that will transmit energy to the robot, as shown in Figure: The dock station he dock also has tabs that can be screwed to the floor or wall to fix it in place, although this is not required. It is important to emphasize that although the charger possesses several security protections, the user should not touch or meddle with the power contacts, for safety reasons.

Figure: The dock station¶
15.3 Installation¶
The dock station should be preferably mounted against a hard surface, to avoid the robot displacing it while doing a docking manoeuvre. The power charger must be plugged in the respective plug. The user must also assure that no objects are present in the dock surroundings, that could interfere with the docking manoeuvre.
15.4 Docking Algorithm¶
When the robot is asked to go to the dock station, it activates two services in parallel. The first is responsable for the pattern detection, while the second performs the servoing to reach the power contacts: - pattern detector: the robot is capable of detecting the pattern up to 1 meters from the LIDAR sensor and with an orientation angle of ± 10º. - servoing manoeuvre: it comprises two steps, where first the robot aligns itself with the power contacts and, secondly, advances until the contact is made or a timeout occurs (in the case the dock station is not powered, or the contact fails for example).
The figure below illustrates the requirements for the docking maneouvre.
Once the robot is docked, it will block most velocity commands sent to the base, in order to avoid manoeuvres that could possibly damage the robot or the dock station. There are only two ways of moving the robot after is it docked: by doing an undock manoeuvre, or using the gamepad, which can override all velocity commands.
WARNING: It is the sole responsability of the user to operate safely the robot with the gamepad after the robot has reached the dock station.
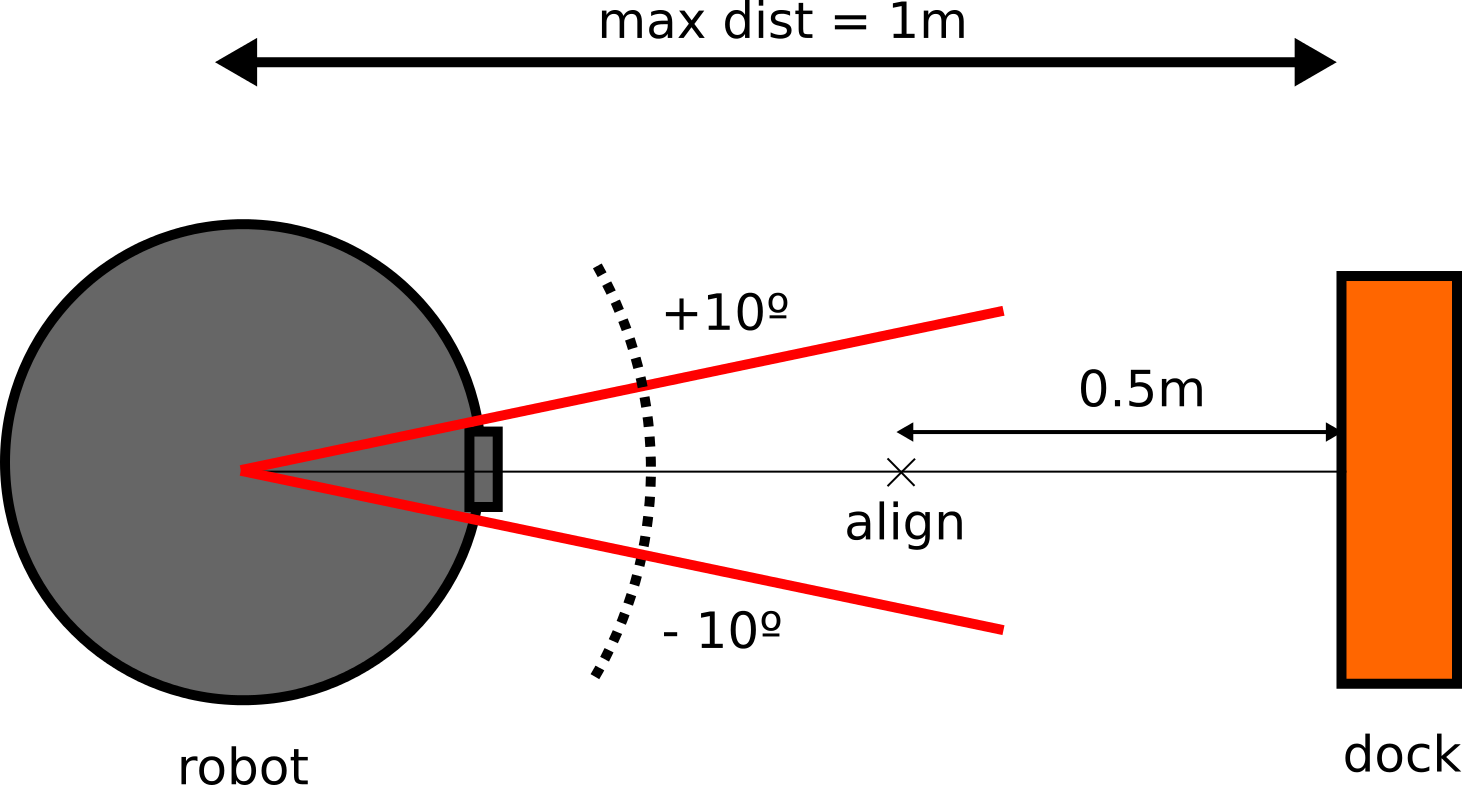
Figure: The docking specifications¶
15.4.1 Dock/Undock code example¶
Finally, the user can interface with the action servers directly by code, in either Python or C++. There is plenty examples of the usage of action clients in ROS Wiki. Bellow there is a very simple example in Python code, that connects and sends a goal to the /go_and_dock server. Note that the field goal.use_current_pose (line 19) is set to False, as in the previous example.
1. #! / usr/bin / env python
2. import rospy
3. import rospkg
4. import actionlib
5.
6. from dock_charge_sm_msgs.msg import GoAndDockAction, GoAndDockGoal
7. from std_msgs.msg import Bool
8.
9. class SimpleDock():
10. def __init__(self) :
11.
12. rospy.init_node('simple_dock')
13. self.dock_checker_sub = rospy.Subscriber("/power/is_docked", Bool, self.is_docked_cb)
14. self.is_docked = False
15.
16. def go_and_dock_client(self):
17.
18. goal = GoAndDockGoal()
19. goal.use_current_pose = True
20. self.dock_client = actionlib.SimpleActionClient("go_and_dock", GoAndDockAction)
21. self.dock_client.wait_for_server()
22. self.dock_client.send_goal(goal)
23. rospy.loginfo("goalsenttogoanddockserver")
24.
25. def is_docked_cb(self, is_docked):
26. if(is_docked.data):
27. self.dock_checker_sub.unregister()
28. rospy.loginfo("simpledocker:therobotisdocked!")
29. quit()
30.
31. if __name__ == '__main__':
32. try:
33. sd = SimpleDock()
34. sd.go_and_dock_client()
35. rospy.spin ()
36. except rospy.ROSInterruptException:
37. print ( "programinterruptedbeforecompletion")
16 Simulation¶
16.1 Overview¶
When installing a development computer, as explained in develop-comp, the user can run Gazebo simulations of TIAGo OMNI Base.
Three different simulation worlds are provided with TIAGo OMNI Base, which are described in the following subsections.
16.1.1 Empty world¶
This is the default world that is loaded when the simulation is launched. The robot is spawned in an empty world with no objects, as shown in Figure: Empty world simulated in Gazebo. In order to launch the simulation, the following instruction needs to be executed in a terminal:
source /opt/pal/gallium/setup.bash
roslaunch omni_base_0_gazebo omni_base_gazebo.launch world:=empty
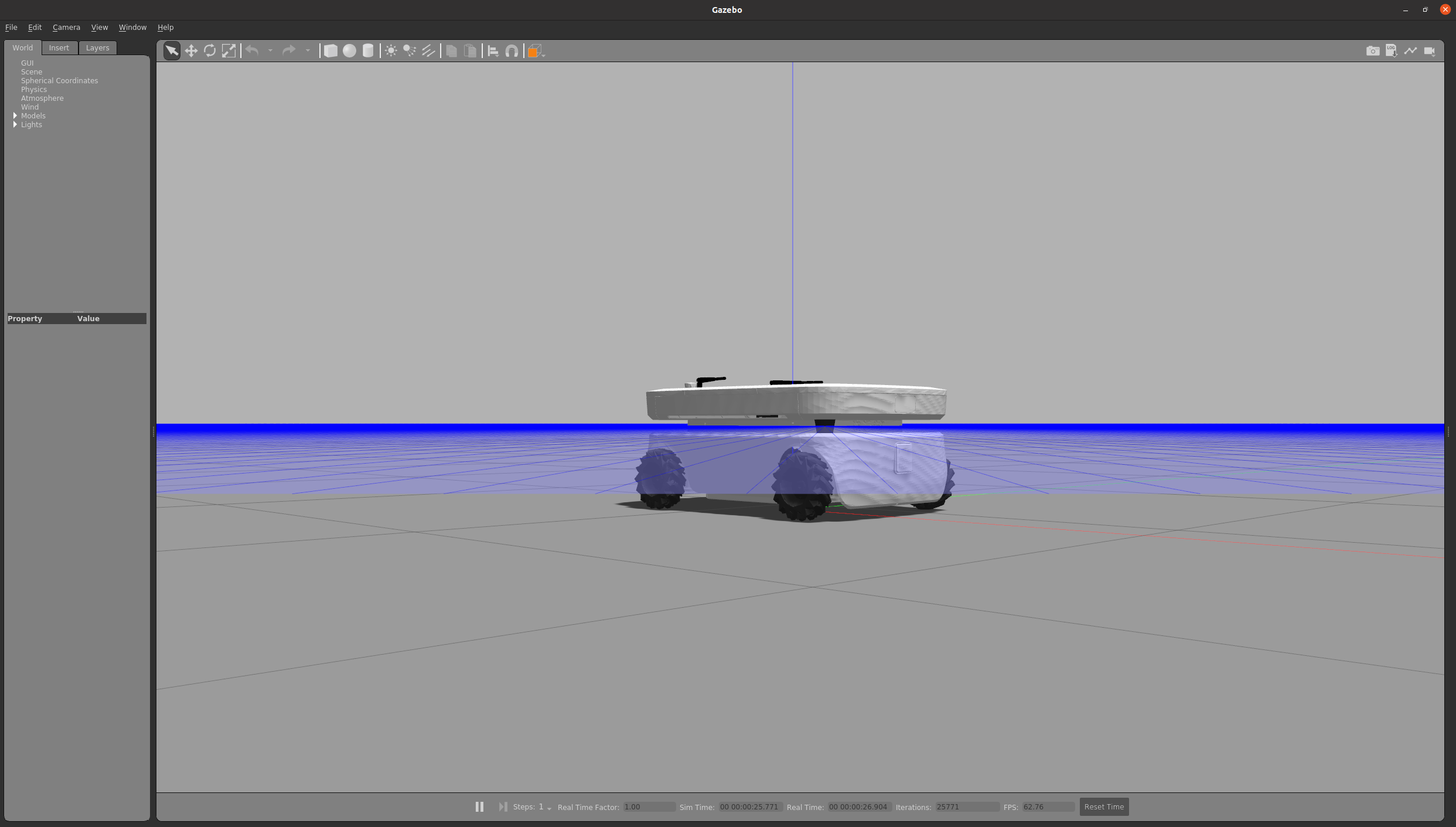
Figure: Empty world simulated in Gazebo¶
16.1.2 Office world¶
The simple office world shown in Figure: Small office world simulated in Gazebo can be simulated with the following instruction:
source /opt/pal/gallium/setup.bash
roslaunch omni_base_0_gazebo omni_base_gazebo.launch world:=small_office
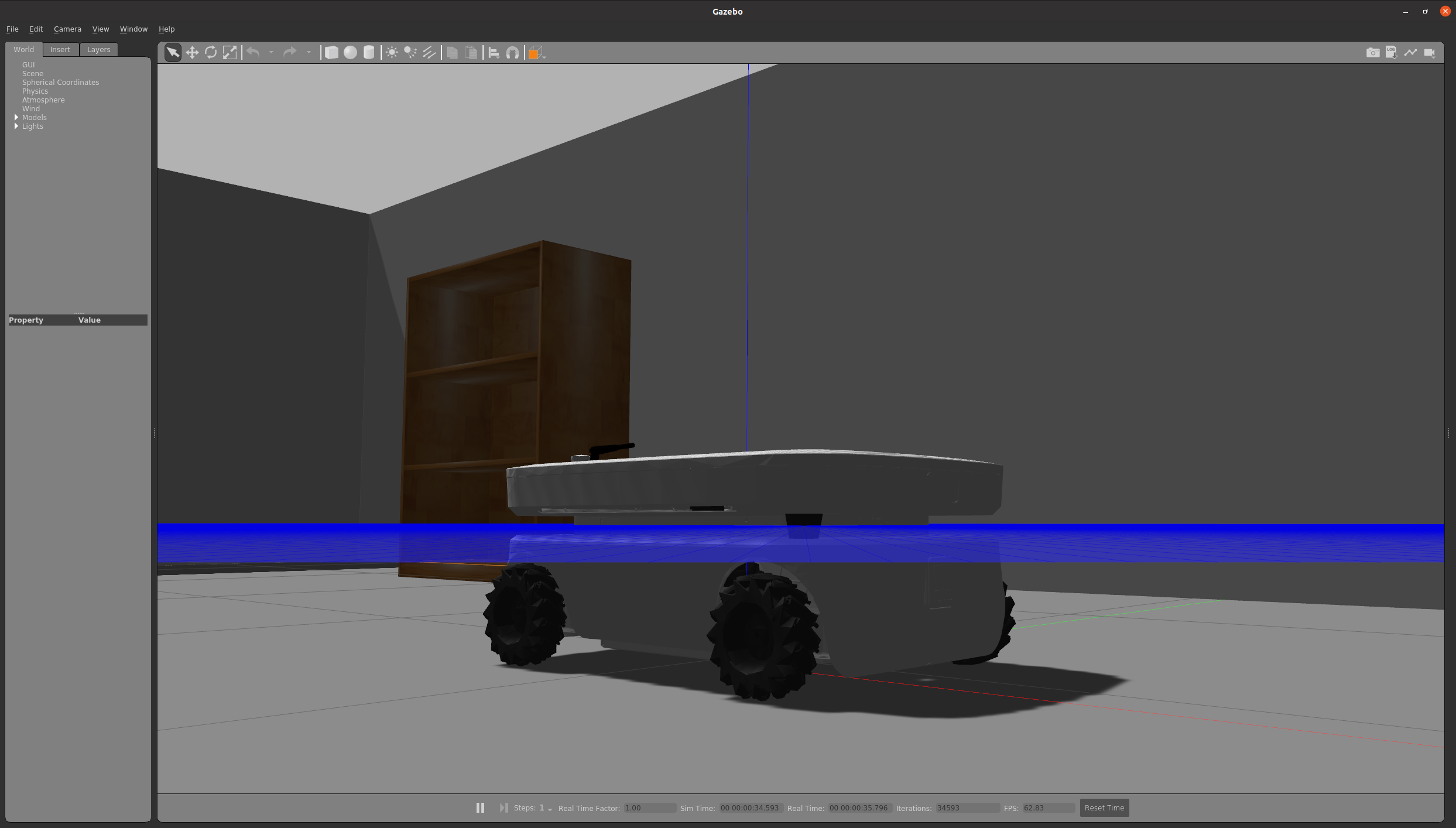
Figure: Small office world simulated in Gazebo¶